自动控制系统-控制系统
自动控制原理
控制系统的一般概念
控制理论
自动控制理论是研究自动控制系统组成,进行系统分析设计的一般性理论,是研究自动控制过程共同规律的技术学科。
经典控制理论
- 时域法
- 复域法(根轨迹法)
- 频域法
现代控制理论
- 线性系统
- 最优控制
- 最佳估计
- 系统辨识
基本概念
基本控制方式有三种:
- 开环控制
- 闭环控制
- 复合控制
其中在自动控制系统中最重要的是闭环控制。
而构成闭环控制系统的核心是负反馈原理。
闭环负反馈控制系统的特点有:
- 系统内部存在反馈,信号流动构成闭回路
- 偏差起调节作用
基本组成
定义
任何一个自动控制系统都是由被控对象和控制器构成的。一个典型的自动控制系统的功能框图如下。
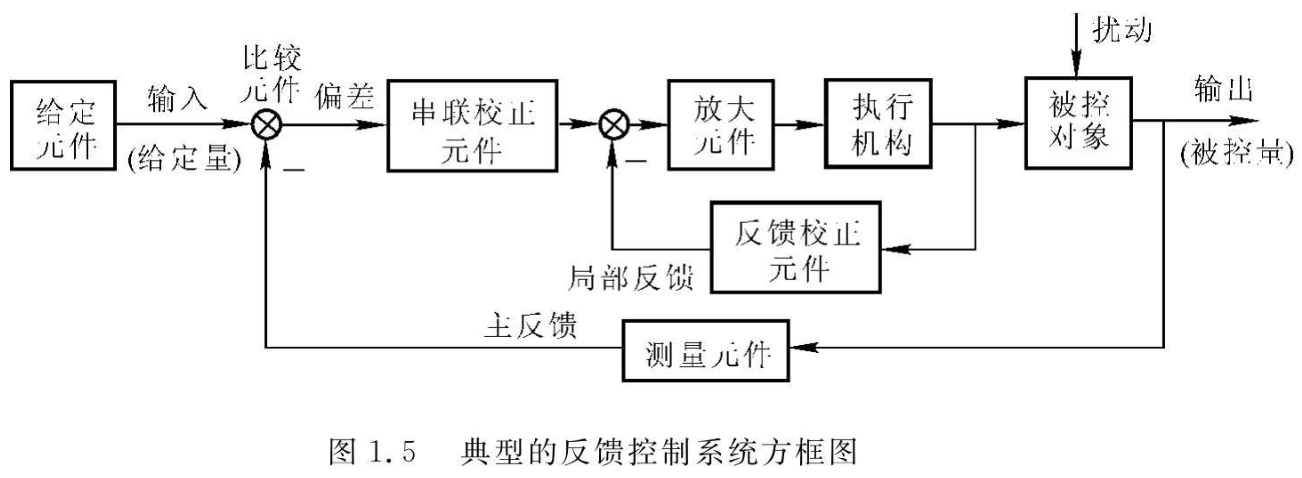
被控对象:一般是指生产过程中需要进行控制的工作机械、装置或生产过程。描述被控对象工作状态的、需要进行控制的物理量就是被控量。
给定元件:主要用于产生给定信号或控制输入信号。例如直流电动机转速控制系统中的电位器。
测量元件:用于检测被控量或输出量,产生反馈信号。如果测出的物理量属于非电量,般要转换成电量以便处理。例如直流电动机转速控制系统中的测速发电机。
比较元件:用来比较输入信号和反馈信号之间的偏差。它可以是一个差动电路,也可以是一个物理元件(如电桥电路、差动放大器、自整角机等)。
放大元件:用来放大偏差信号的幅值和功率,使之能够推动执行机构调节被控对象,例如功率放大器、电液伺服阀等。
执行机构:用于直接对被控对象进行操作,调节被控量,例如阀门、伺服电动机等。
校正元件:用来改善或提高系统的性能。常用串联或反馈的方式连接在系统中,例如 RC 网络、测速发电机等。
在这之中我们关注放大元件、校正装置和给定元件。
实例
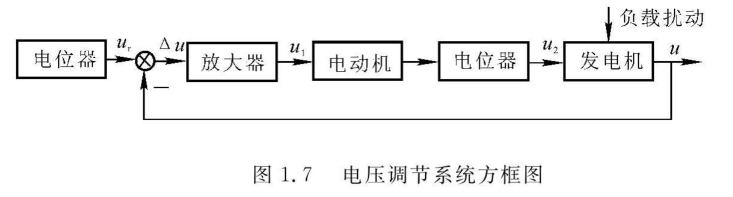
电压调节系统
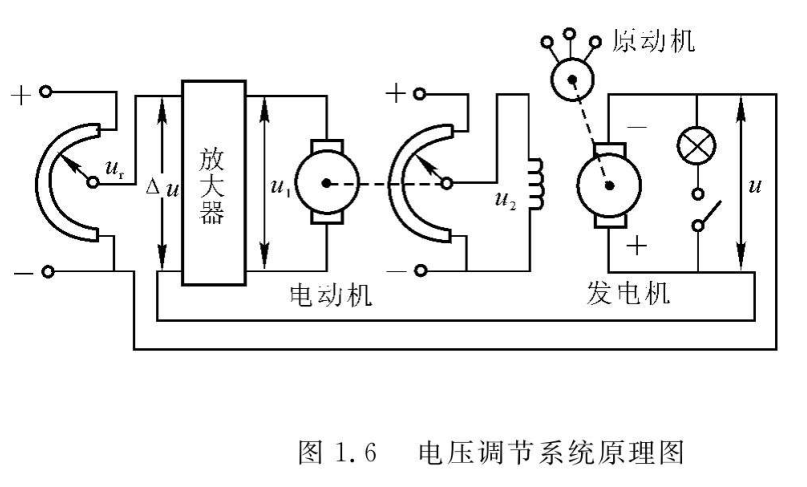
可在系统中,发电机是被控对象,发电机的输出电压是被控量,给定电位器设定的电压 \(u_t\) 是给定量。
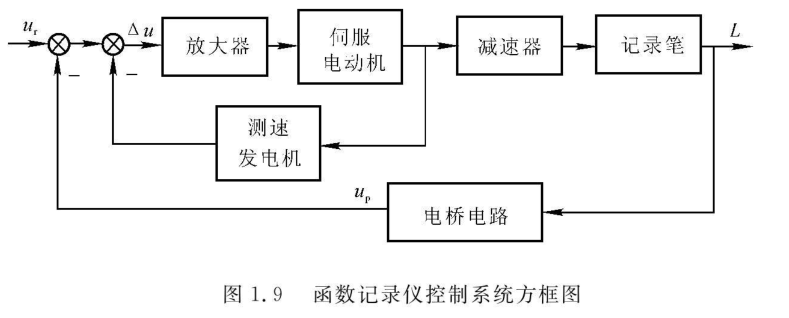
函数记录仪
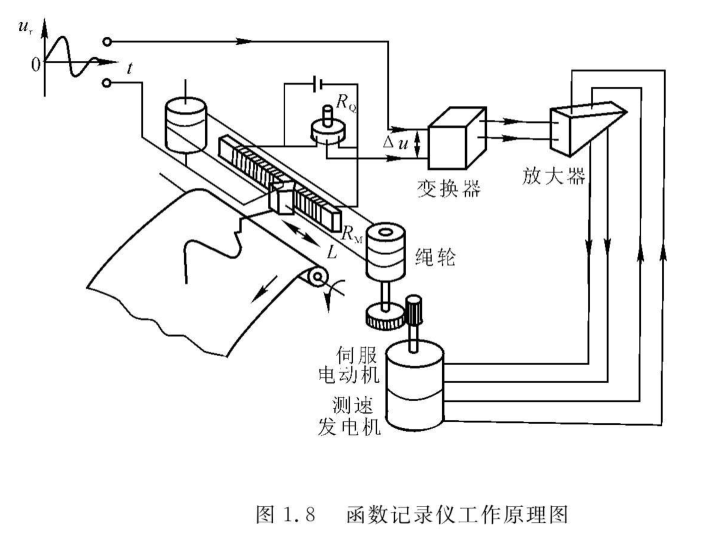
测速发电机是校正元件,它测量电动机转速并进行反馈,用以增加阻尼,改善系统性能。
火炮方位角控制系统
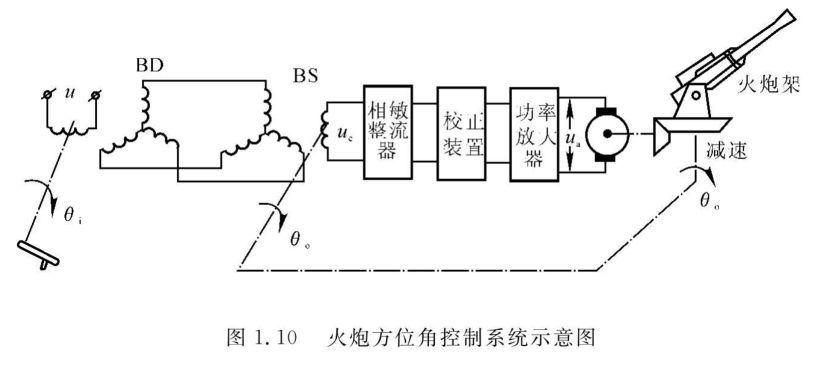
火炮是被控对象,火炮方位角 \(\theta_o\) 是被控量,手柄给定的方位角 \(\theta_i\) 是给定量。

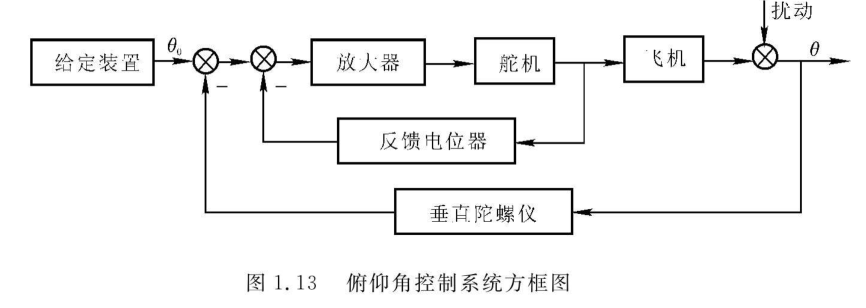
飞机-自动驾驶系统
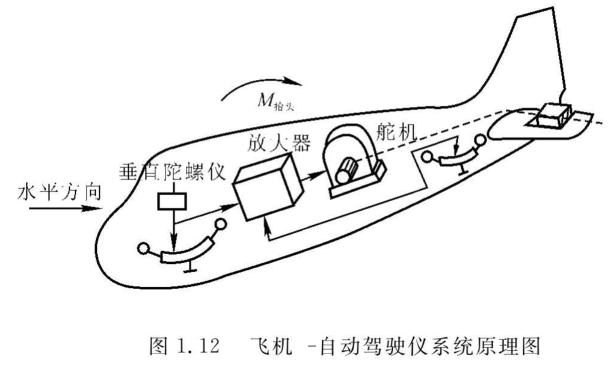
飞机是被控对象,俯仰角是被控量,放大器、舵机、垂直陀螺仪、反馈电位计等组成控制系统,给定的常值俯仰角是参考量。
分类
按给定信号的形式不同
- 恒值控制系统(定值系统/调节系统):控制输入是恒定值,要求被控量保持给定值不动,例如液位控制系统、直流电动机调速系统等。
- 随动控制系统(伺服系统):控制输入是变化规律未知的时间函数(\(f_{in}(t)\) 是关于时间的函数),要求被控量按同样的规律变化,并与输入信号的误差保持在规定范围内,例如函数记录仪、控制火炮系统等。
- 程序控制系统:给定信号按预先编制的程序确定,要求被控量按相应的规律随控制信号变化,例如机械加工中的数控机床。
按系统参数是否随时间变化
- 时不变系统(定常系统):控制系统的参数在系统运行过程中不随时间变化(实际上一般是针对系统参数的变化相对于系统的运动缓慢得多的系统来近似讨论)
- 时变系统:控制系统的参数在系统运行过程中随时间变化
按系统是否满足叠加原理
- 线性系统:由线性元件组成的系统,系统的运动方程能用线性微分方程描述。主要特点是具有齐次性和叠加性,系统响应与初始状态无关,系统的稳定性与输入信号无关。
- 非线性系统:含有一个以上的非线性元件所组成的系统,特点是不满足叠加原理,系统响应与初始状态和外作用都有关系。‘
按信号是否连续
- 连续系统:系统中各部分信号都是连续函数形式的模拟量。
- 离散系统(采样系统或数字系统):系统中有一处或几处的信号是离散信号(脉冲序列或数码)。例如计算机控制系统。
按输入输出信号的数目
- 单变量系统:系统中只有一个输入和一个输出。(可以视为多变量系统的特例)
- 多变量系统:系统中有多个输入或多个输出。
自动控制系统的要求:稳、准、快