模式识别-贝叶斯决策论笔记
模式识别
贝叶斯决策论
公式
贝叶斯概率是由贝叶斯提出的一种“逆概”的概念,计算正向概率的方法对于当时的人们而言是十分轻易的,例如“假设容器中有N个白球,M个黑球,随机抽取一个球,抽取的是白球的概率是多少”。但一个自然而然的问题是与正向概率相反的,例如“随机抽取一个(多个)球,知道了抽取的概率,那么容器内黑白球的比例是多少”。
这个问题是现实的,因为往往人们对一个事件进行评价的时候,无法掌握因,而只能知晓果,由果推因是人们常做的事情。
条件概率
要理解贝叶斯公式首先需要了解条件概率,定义 \(P(A|B)\) 为在事件 \(B\) 发生后,事件 \(A\) 发生的概率。
条件概率公式: \[ P(A|B)=\frac{P(AB)}{P(B)} \] 其中 \(P(A|B)\) 是条件概率,\(P(AB)\) 是两个事件共同发生的概率,\(P(B)\) 是事件 \(B\) 作为独立事件单独发生的概率。
例如掷骰子,掷出3点以上的概率为 \(P(\text{掷出3点以上})=1/2\),而掷出3点以上又为偶数的概率为 \(P(\text{掷出3点以上又为偶数})=1/3\),那么我们可以计算得到已经掷出3点以上后,点数为偶数的概率为 \[ P(\text{掷出3点以上}|\text{点数为偶数})=\frac{P(\text{掷出3点以上又为偶数})}{P(\text{掷出3点以上})}=2/3 \] 显然,符合我们通过古典概型计算得到的结果。
概率密度函数
定义连续型随机变量的概率密度为 \[ F(x)=\int^\infty_{-\infty}f(t)\mathrm{d}t \] 其中 \(F(x)\) 为随机变量 \(X\) 的分布函数,则称 \(f(x)\) 为 \(X\) 的概率密度函数,简称概率密度或密度函数。
而分布函数的定义为 \[ F(\xi)=P(X<\xi) \] 反之有 \[ f(x)=\frac{\mathrm{d}F(x)}{\mathrm{d}x} \]
全概率公式
\[ P(B)=P(B|A)P(A)+P(B|\bar{A})P(\bar{A}) \]
用于求贝叶斯公式中的无条件概率 \(P(B)\),其中事件 \(\bar{A}\) 代表事件 \(A\) 不发生。
完整公式有 \[ \begin{align*} P(B)&=P(BA_1)+P(BA_2)+\cdots+P(BA_n)\\ &=P(B|A_{1}) P(A_{1})+P(B|A_{2})P(A_{2})+\cdots+P(B|A_{n})P(A_{n})\\ &=\sum^n_{i=1}P(A_i)P(B|A_i) \end{align*} \]
贝叶斯公式
通过条件概率公式变形,可以得到 \[ P(AB)=P(A)P(B|A)=P(B)P(A|B) \] 整理可得贝叶斯公式 \[ P(A|B)=P(A)\frac{P(B|A)}{P(B)} \] 其中我们把 \(P(A)\) 称作先验概率,即事件 \(A\) 发生的概率,称为先验是因为该概率并不考虑事件 \(B\) 的影响,即在事件 \(B\) 发生前,对事件 \(A\) 概率的一个评估。
\(P(A|B)\) 称作后验概率,即事件 \(B\) 发生后,事件 \(A\) 发生的概率,也是对事件 \(A\) 概率的重新评估。
而因子 \(P(B|A)/P(B)\) 称作可能性函数(likelihood),也是一个调整因子,使得预估概率更加接近真实概率。(\(P(B)\) 也称作证据概率(evidence probability))
\(P(B)\) 可用全概率公式求解。
故贝叶斯公式可以表达为:**后验概率=先验概率*可能性函数**
根据可能性函数的公式,我们可以知道:
当“可能性函数>1”时,先验概率被增强,事件 \(A\) 发生的概率增大;
当“可能性函数=1”时,意味着事件 \(B\) 无助于判断事件 \(A\) 发生的概率;
当“可能性函数<1”时,先验概率被削弱,事件 \(A\) 发生的概率减小。
贝叶斯公式的意义在于帮助我们在有限信息的情况下,尽量得到客观概率的近似值(先验概率由我们主观估计,通过可能性函数进行修正我们的先验概率得到后验概率,即客观概率的近似值)。
实际应用
已知两个一模一样的容器,容器 \(A_1\) 中有 30 个白球和 10 个黑球,而容器 \(A_2\) 中有 20 个白球和 20 个黑球,现在从中随机摸出一个球是白球,请问这个白球来自一号容器的概率是多少?
我们可以列出下面一个表:
| 容器/分类 | \(A_1\) | \(A_2\) |
|---|---|---|
| 白球 | 30 | 20 |
| 黑球 | 10 | 20 |
可以知道先验概率 \(P(A_1)=P(A_2)=0.5\)(不受摸出来的球的影响下,球来自哪个容器的概率)
假定事件 \(B\) 为摸出白球,有 \(P(B)=(30+20)/80=5/8\)
而已知在容器 \(A_1\) 中摸出白球的概率为 \(P(B|A_1)=30/40=3/4\)
那么我们要求的后验概率 \(P(A_1|B)=P(A_1)P(B|A_1)/P(B)=3/5\),即在抽取的球为白球时,球来自容器 \(A_1\) 的概率为 0.6。
其中可能性函数 \(P(B|A_1)/P(B)=1.2\),即先验概率被增强了。
举个更具体的例子,因为艾滋病潜伏期很长,所以即便感染了也可能在很长的一段时间,身体没有任何感觉,所以艾滋病检测的假阳性会导致被测人非常大的心理压力。
你可能会觉得,检测准确率都99%了,误测几乎可以忽略不计了吧?所以你觉得这人肯定没有患艾滋病了对不对?
让我们用贝叶斯定理算一下,就会发现你的直觉是错误的。
假设某种疾病的发病率是0.001,即1000人中会有1个人得病。现在有一种试剂可以检验患者是否得病,它的准确率是0.99,即在患者确实得病的情况下,它有99%的可能呈现阳性。它的误报率是5%,即在患者没有得病的情况下,它有5%的可能呈现阳性。
现在有一个病人的检验结果为阳性,请问他确实得病的可能性有多大?
病人的检验结果为阳性(新的信息)记为事件 \(B\),他得病记为事件 \(A\)。
那么要求的问题就是 \(P(A|B)\),也就是病人的检验结果为阳性 \(P(B)\),他确实得病的概率 \(P(A)\)。
已知信息为这种疾病的发病率是 0.001,即 \(P(A)=0.001\)
试剂可以检验患者是否得病,准确率是 0.99,也就是在患者确实得病的情况下\(P(A)\),它有 99% 的可能呈现阳性 \(P(B)\),所以 \(P(B|A)=0.99\)
试剂的误报率是 5%,即在患者没有得病的情况下,它有 5% 的可能呈现阳性。得病我们记为事件 \(A\),那么没有得病就是事件 \(A\) 的反面,记为 \(\bar{A}\),所以这句话就可以表示为 \(P(B|\bar{A})=0.05\)
可能性函数为 \(P(B|A)/P(B)=19.4346\),可以知道先验概率被增强,得到后验概率为 \(P(A|B)=0.0194\),即筛查的准确率都到了 99% 了,通过体检结果有病(阳性)确实得病的概率也只有 1.94%。
由于发艾滋病实在是小概率事件,所以当我们对一大群人做艾滋病筛查时,虽说准确率有 99%,但仍然会有相当一部分人因为误测而被诊断为艾滋病,这一部分人在人群中的数目甚至比真正艾滋病患者的数目还要高。
造成这么不靠谱的误诊的原因,是无差别地给一大群人做筛查,而不论测量准确率有多高,因为正常人的数目远大于实际的患者,所以误测造成的干扰就非常大了。
根据贝叶斯定理,我们知道提高先验概率,可以有效的提高后验概率。
所以解决的办法倒也很简单,就是先锁定可疑的人群,比如10000人中检查出现问题的那10个人,再独立重复检测一次。因为正常人连续两次体检都出现误测的概率极低,这时筛选出真正患者的准确率就很高了,这也是为什么许多疾病的检测,往往还要送交独立机构多次检查的原因。
这也是为什么艾滋病检测第一次呈阳性的人,还需要做第二次检测,第二次依然是阳性的还需要送交国家实验室做第三次检测。
决策论
定义
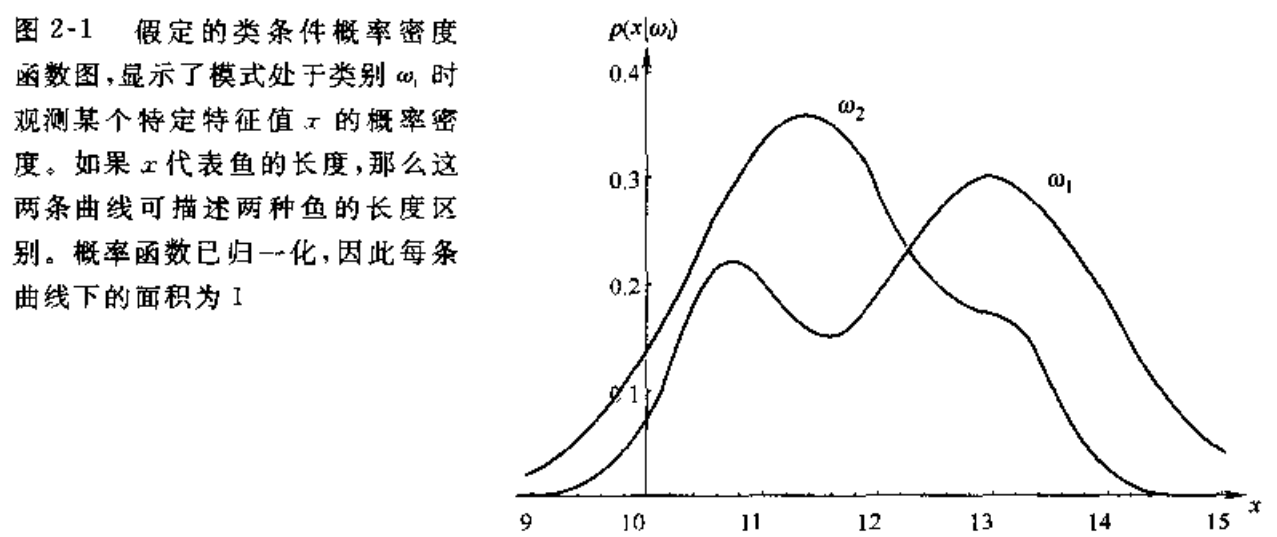
我们首先定义 \(\boldsymbol{x}\) 为特征向量,假定 \(\boldsymbol{x}\) 是一个连续随机变量,其分布取决于类别状态,表示为 \(p(\boldsymbol{x}|\omega)\),将该概率密度函数称作类条件概率密度(class-conditional probability),即类别状态为 \(\omega\) 时 \(\boldsymbol{x}\) 的概率密度函数,又叫做似然(likelihood)。通俗理解为分类作为概率密度函数的条件。
其中 \(p(\boldsymbol{x})\) 为证据概率(evidence probability),\(P(\omega_i|\boldsymbol{x})\) 为后验概率(posterior probability),而 \(P(\omega_i)\) 为先验概率(prior probability)。
贝叶斯分类
对一个模式(pattern)进行分类,只根据先验概率进行决策是不现实的,这会导致分类永远只有一个结果。
例如取 \(\omega_1,\omega_2\) 为鲈鱼和鲑鱼,可知鲑鱼要比鲈鱼稀有,仅从客观概率上来说,\(P(\omega_1)>P(\omega_2)\),此时无论如何判决都会选取 \(\omega_1\) 而非 \(\omega_2\)。
为了更好的分类,我们需要引入模式的特征(feature),结合特征进行分类。
而贝叶斯分类就是结合特征和贝叶斯概率的结果进行决策。
根据贝叶斯公式: \[ P(\omega_j|\boldsymbol{x})=\frac{p(\boldsymbol{x}|\omega_j)P(\omega_j)}{p(\boldsymbol{x})} \] 我们可以通过观测 \(\boldsymbol{x}\) 的值将先验概率 \(P(\omega_j)\) 转化为后验概率,即假设特征向量已知的条件下,类别为 \(\omega_j\) 的概率。
其中 \(p(\boldsymbol{x})\) 和 \(p(\boldsymbol{x}|\omega_j)\) 是可以通过已知的部分信息学习得知的。
例如取特征向量 \(\boldsymbol{x}\) 为鱼的长度,我们可以通过样本(sample)计算其长度总的出现频率(证据概率密度,或者也可以使用全概率公式求解)和在类别为 \(\omega_1,\omega_2\) 时长度的出现频率(类条件概率密度)。
此时我们的判决规则为:
如果 \[ P(\omega_1|\boldsymbol{x})>P(\omega_2|\boldsymbol{x}) \] 则判决为 \(\omega_1\)。
正如贝叶斯概率的核心思想,我们通过先验概率(主观判断或客观事实)和已知信息(果或者似然)计算得到了后验概率(因或逆概)。
需要分清的是,\(p(\boldsymbol{x}|\omega_j)\) 是训练/学习(training/learning)计算得到的,而 \(P(\omega_j|\boldsymbol{x})\) 是用来预测(predict)的,在模式识别中是两个阶段。
连续特征下的决策论
将以上想法进一步正式化,推广为如下 4 种形式:
- 允许使用多于一个的特征
- 允许多余两种类别状态的情形
- 允许有其他行为而不仅仅是判定类别
其中,我们定义:
- 特征使用特征向量 \(\boldsymbol{x}\) 来描述多个特征
- 集合 \(\Omega=\{\omega_1,\omega_2\,\cdots,\omega_c\}\) 为有限的 \(c\) 个类别(state)集合
- 集合 \(A=\{\alpha_1,\alpha_2,\cdots,\alpha_a\}\) 为有限的 \(a\) 个可能的行动(action)集合
我们已知 \[ P(\omega_j|\boldsymbol{x})=\frac{p(\boldsymbol{x}|\omega_j)P(\omega_j)}{p(\boldsymbol{x})} \] 此时证据因子 \(p(\boldsymbol{x})\) 为 \[ p(\boldsymbol{x})=\sum^c_{j=1}p(\boldsymbol{x}|\omega_j)P(\omega_j) \] 对于简单化判决而言,判决规则是一个函数 \(\alpha(\boldsymbol{x})\),值域为集合 \(\Omega\)。
最小误差概率决策
对于二分类问题,如果有某个观测值使得 \(P(\omega_1|\boldsymbol{x})>P(\omega_2|\boldsymbol{x})\),那么我们自然的可以判断该模式来自于分类 \(\omega_1\)。
例如说,当先验概率 \(P(\omega_1)=2/3,P(\omega_2)=1/3\),则后验概率 \(P(\omega_1 | \boldsymbol{x})\) 和 \(P(\omega_2|\boldsymbol{x})\) 如图所示
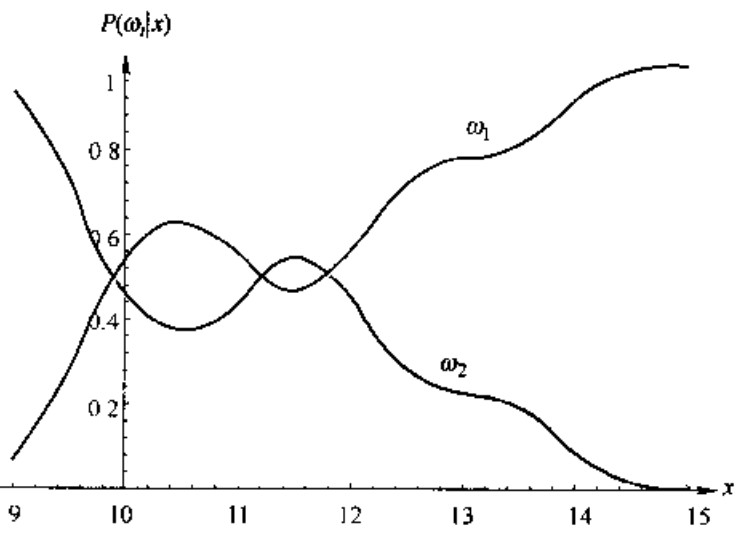
此时假定一个模式具有特征值 \(x=14\),那么它属于 \(\omega_2\) 类的概率约为 0.08,属于 \(\omega_1\) 类的概率约为 0.92,在此次后验概率之和为 1.0,此时为最小化误差概率,故选择此模式属于 \(\omega_1\)。
同时该决策下的误差概率为: \[ P(error|\boldsymbol{x})=1-P(\omega_1|\boldsymbol{x}) \] 即有: \[ P(error|\boldsymbol{x})=\begin{cases} P(\omega_1|\boldsymbol{x})\text{,choose }\omega_2\\ P(\omega_2|\boldsymbol{x})\text{,choose }\omega_1 \end{cases} \] 可以验证,这种规则将平均误差概率最小化。
平均误差概率表示为 \[ P(error)=\int_{-\infty}^{\infty} P(error,x)\mathrm{d} x=\int_{-\infty}^{\infty} P(error|x) p(x)\mathrm{d}x \]
上述决策等价于,
若 \(P(\boldsymbol{x}|\omega_1)P(\omega_1)>P(\boldsymbol{x}|\omega_2)P(\omega_2)\),则决策为 \(\boldsymbol{x}\in\omega_1\);
若 \(P(\boldsymbol{x}|\omega_1)P(\omega_1)<P(\boldsymbol{x}|\omega_2)P(\omega_2)\),则决策为 \(\boldsymbol{x}\in\omega_2\)。
即 \[ \frac{P(\boldsymbol{x}|\omega_1)}{P(\boldsymbol{x}|\omega_2)}>\frac{P(\omega_2)}{P(\omega_1)} \] 判决为 \(\omega_1\)。
其中, \[ \frac{P(\boldsymbol{x}|\omega_1)}{P(\boldsymbol{x}|\omega_2)} \] 称作似然比。
实例如下
某地区细胞识别中正常(\(\omega_1\))和异常(\(\omega_2\))两类的先验概率为 \(P(\omega_1)=0.9,P(\omega_2)=0.1\),且知道两类的类概率密度函数 \(p(x|\omega_1),p(x|\omega_2)\)。
先有一细胞特征值为 \(x\),查询类概率密度函数曲线有 \(P(x|\omega_1)=0.2,P(x|\omega_1)=0.4\)。
采用最小误差概率决策,得到 \[ P(x|\omega_1)/P(x|\omega_2)=1/2\\ P(\omega_2)/P(\omega_1)=1/9 \] 显然似然比大于先验概率反比,故判决为 \(x\in \omega_1\),为正常细胞。
最小风险(损失)决策
基于最小误差概率的贝叶斯决策,仅考虑了最小化错误概率,未考虑决策所带来的损失,这是与实际应用不相符的,例如灭火系统、乙肝诊断等,总会存在一定的误判损失。
所以我们需要引入一个更一般的风险函数(loss function)来替代误差概率。
定义风险函数 \(\lambda(\alpha_i|\omega_j)\) 描述类别状态为 \(\omega_j\) 时,采取行动 \(\alpha_i\) 的风险(对风险的一个评估)。
或称为损失函数。
定义总风险 \(R\) 是与某一给定的判决规则相关的预期损失,且 \(R(\alpha_i|\boldsymbol{x})\) 是和行动 \(\alpha_i\) 相关的条件风险,总风险则表示为 \[ R=\int R(\alpha(\boldsymbol{x})|\boldsymbol{x})p(\boldsymbol{x})\mathrm{d}\boldsymbol{x} \]
\(\mathrm{d}\boldsymbol{x}\) 说明积分是在整个特征空间进行的。
可知,如果使得 \(R(\alpha_i|\boldsymbol{x})\) 对每个 \(\boldsymbol{x}\) 尽可能小,那么总风险 \(R\) 将被最小化。
故为了最小化总风险,对行动集合 \(A\) 计算条件风险 \[ R(\alpha_i|\boldsymbol{x})=\sum^c_{j=1}\lambda(\alpha_i|\omega_j)P(\omega_j|\boldsymbol{x}) \] 并选择行动 \(\alpha_i\) 使得 \(R(\alpha_i|\boldsymbol{x})\) 最小化。
最小化后的总风险值称为贝叶斯风险,记作 \(R^*\)。
对于二分类问题,可以将条件风险简化为 \[ R(\alpha_1|\boldsymbol{x})=\lambda_{11}P(\omega_1|\boldsymbol{x})+\lambda_{12}P(\omega_2|\boldsymbol{x})\\ R(\alpha_2|\boldsymbol{x})=\lambda_{21}P(\omega_1|\boldsymbol{x})+\lambda_{22}P(\omega_2|\boldsymbol{x}) \]
\(\lambda_{ij}\) 为简记 \(\lambda(\alpha_i|\omega_j)\)
判别的基本规则为当 \(R(\alpha_1|\boldsymbol{x})<R(\alpha_2|\boldsymbol{x})\) 时,则判为 \(\omega_1\)(描述为当决策为 \(\omega_1\) 的损失小于决策为 \(\omega_2\) 的损失时,判别为 \(\omega_1\))。
化简为用后验概率的形式描述该公式:
如果 \[ (\lambda_{21}-\lambda_{11})P(\omega_1|\boldsymbol{x})>(\lambda_{12}-\lambda_{22})P(\omega_2|\boldsymbol{x}) \] 则判决为 \(\omega_1\)。
利用贝叶斯公式,改为用先验概率描述规则,则变更为:
如果 \[ (\lambda_{21}-\lambda_{11})p(\boldsymbol{x}|\omega_1)P(\omega_1)>(\lambda_{12}-\lambda_{22})p(\boldsymbol{x}|\omega_2)P(\omega_2) \] 则判决为 \(\omega_1\)。
另一种表示方式是,合理假设 \(\lambda_{21}>\lambda_{11}\) 的条件下:
如果 \[ \frac{p(\boldsymbol{x}|\omega_1)}{p(\boldsymbol{x}|\omega_2)}>\frac{\lambda_{12}-\lambda_{22}}{\lambda_{21}-\lambda_{11}}\frac{P(\omega_2)}{P(\omega_1)} \] 则判决为 \(\omega_1\)。
左式即为似然比。
这种判决规则的优势是,只依赖于 \(\boldsymbol{x}\) 的概率密度。
作出似然比函数,可以得知该种决策的判别边界与右式相关,当似然比大于判别边界时,判决为 \(\omega_1\)。
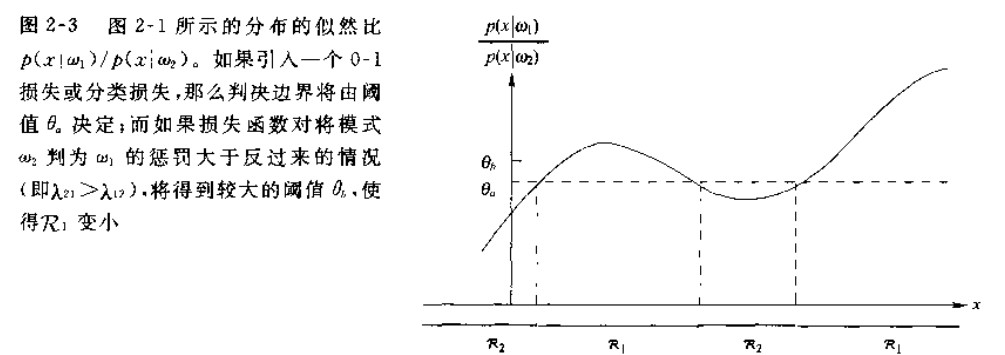
为方便判决,如上图,会选取一个阈值 \(\theta_m\) 使得 \[ \frac{p(\boldsymbol{x}|\omega_1)}{p(\boldsymbol{x}|\omega_2)}>\frac{\lambda_{12}-\lambda_{22}}{\lambda_{21}-\lambda_{11}}\frac{P(\omega_2)}{P(\omega_1)}>\theta_m \] 即为判决边界,如图虚线所示。
同时由公式可知,当 \(\lambda_{12}-\lambda_{22}=\lambda_{21}-\lambda_{11}\) 时,无论选择最小误差概率决策还是最小风险决策都是等价的。
实例如下
同最小误差概率决策中的实例,但此时给出损失表如下
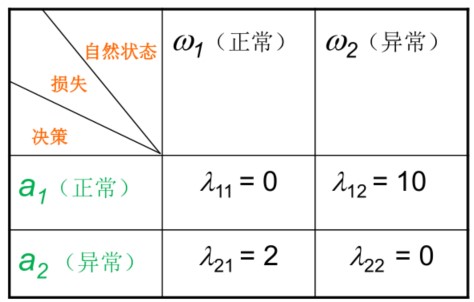
似然比为 0.5,计算损失比 \[ \frac{\lambda_{12}-\lambda_{22}}{\lambda_{21}-\lambda_{11}}=5 \] 显然 \[ \frac{1}{2}<5\times\frac{1}{9} \] 此时如果判决为 \(\omega_1\) 风险(损失)更大,故此时判决为 \(x\in \omega_2\),为异常细胞。
最小误差率决策
如果要避免误判,自然要寻找一种判决规则使误判概率(即误差率)最小化。
这种情况下的损失函数就是所谓的“对称损失”或者“0-1 损失”函数: \[ \lambda(\alpha_i|\omega_j)=\begin{cases} 0,i=j\\ 1,i\neq j \end{cases} \] 其中要求 \(1<i,j<c\)。
从此简化模型可知,所有误判都是等代价的。
这个损失函数对应的条件风险就是平均误差概率,它的条件风险为: \[ \begin{align} R(\alpha_i|\boldsymbol{x})&=\sum^c_{j=1}\lambda(\alpha_i|\omega_j)P(\omega_j|\boldsymbol{x})\\ &=\sum_{i\neq j}P(\omega_j|\boldsymbol{x})\\ &=1-P(\omega_i|\boldsymbol{x}) \end{align} \] 其中 \(P(\omega_i|\boldsymbol{x})\) 是行为 \(\alpha_i\) 分类正确的条件概率。
这种情况下我们想最小化平均误差概率只要选取 \(i\) 使得后验概率 \(P(\omega_i|\boldsymbol{x})\) 最大即可。
或者说是最大化后验概率。
即有决策规则,对于任意 \(j\neq i\),满足 \[ P(\omega_1|\boldsymbol{x})>P(\omega_j|\boldsymbol{x}) \] 则判决为 \(\omega_1\)。
实际应用
某人前往中高风险地区为特征 \(x\),有表
| 分类 | \(\alpha_1=\text{主动上报,自我隔离}\) | \(\alpha_2=\text{做核酸检测}\) | \(\alpha_1=\text{不上报,不做为}\) |
|---|---|---|---|
| \(\omega_1=\text{感染新冠}\) | 5 | 50 | 10000 |
| \(\omega_2=\text{未感染新冠}\) | 60 | 3 | 0 |
知道 \(P(\omega_1|x)=0.01\),\(P(\omega_2|x)=0.99\)
可以计算 \[ \begin{align} R(\alpha_1|x)&=\sum^2_{j=1}\lambda_{1j}P(\omega_j|x)\\ &=\lambda_{11}P(\omega_1|x)+\lambda_{12}P(\omega_2|x)\\ &=5\times0.01+60\times0.99\\ &=59.45\\ R(\alpha_2|x)&=3.47\\ R(\alpha_3|x)&=100\\ \end{align} \] 故可以得知,前往高风险地区时应采取的决策是做核酸(因为做核酸所导致的损失最低)。
分类器、判别函数与判别区域
判别函数
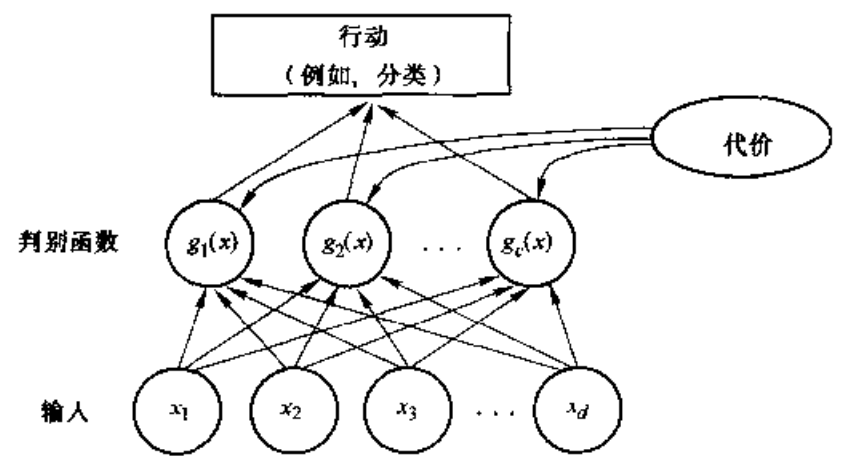
用后验概率与风险函数决策的方式,被称为模式分类器,有很多种方式来表示模式分类器,其中用的最多的是使用判别函数 \(g(\boldsymbol{x})\)。
使用单增函数嵌套的判决结果不变,即 \(f(g(\boldsymbol{x}))\) 对判决无影响,其中 \(f(\boldsymbol{x})\) 为单增函数
如果对于定 \(i\) 有任意的 \(j\) 满足 \[ g_i(\boldsymbol{x})>g_j(\boldsymbol{x}) \] 那么判决为 \(\omega_i\)。
此分类器可视为一个计算 \(c\) 个判别函数并选取最大判别值对应的类型的网络。
简单的判别函数可以表示为后验概率或者条件风险的负值,这样能让判别函数与最小的条件风险对应,判别函数的选择不是唯一的。
以下是常用的最小误差概率决策判别函数: \[ g_i(x)=P(\omega_i|\boldsymbol{x})\\ g_i(x)=p(\boldsymbol{x}|\omega_i)P(\omega_i)\\ g_i(x)=\ln p(\boldsymbol{x}|\omega_i)+\ln P(\omega_i) \] 还有最小风险决策判别函数: \[ g_i(x)=-R(\alpha_i|\boldsymbol{x}) \] 判决规则是相同的,每种判决规则均是将特征空间分成 \(c\) 个判决区域,\(R_1,R_2,\cdots,R_c\)。
如果对于所有的 \(j\neq i\) 有 \(g_i(\boldsymbol{x})>g_j(\boldsymbol{x})\),那么 \(\boldsymbol{x}_i\) 属于 \(R_i\)。
此时该区域由判决边界来分割,其判决边界即判决空间中使判别函数值最大的曲面。
二类分类器
在该种情况下,使用判别函数 \[ g(\boldsymbol{x})=g_1(\boldsymbol{x})-g_2(\boldsymbol{x}) \] 判决规则为:
如果 \[ g(\boldsymbol{x})>0 \] 则判决为 \(\omega_1\),否则判决为 \(\omega_2\)。
一般为简化会多使用以下形式: \[ g(\boldsymbol{x})=P(\omega_1|\boldsymbol{x})-P(\omega_2|\boldsymbol{x})\\ g(\boldsymbol{x})=\ln\frac{p(\boldsymbol{x}|\omega_1)}{p(\boldsymbol{x}|\omega_2)}+\ln\frac{P(\omega_1)}{P(\omega_2)} \]
朴素贝叶斯分类器
我们知道贝叶斯公式如下 \[ P(\omega|\boldsymbol{x})=\frac{P(\boldsymbol{x}|\omega)P(\omega)}{P(\boldsymbol{x})} \] 从中可以知道,估计后验概率 \(P(\omega_j|\boldsymbol{x})\) 的主要困难为:类条件概率 \(P(\boldsymbol{x}|\omega_j)\) 是所有属性上的联合概率,难以从有限的训练样本估计获得。
故采用“属性条件独立性假设”,即每个属性独立地对分类结果发生影响。
即 \(P(AB)=P(A)P(B)\)
基于属性条件独立性假设,可以将贝叶斯公式重写为 \[ P(\omega|\boldsymbol{x})=\frac{P(\boldsymbol{x}|\omega)P(\omega)}{P(\boldsymbol{x})}=\frac{P(\omega)}{P(\boldsymbol{x})}\prod^d_{i=1}P(x_i|\omega) \] 其中,\(d\) 为维度(属性数目),\(x_i\) 为 \(\boldsymbol{x}\) 在第 \(i\) 个维度(属性)上的取值。
其中条件风险函数为 \[ \begin{align} R(\alpha_i|\boldsymbol{x})&=\sum^c_{j=1}\lambda(\alpha_i|\omega_j)P(\omega_j|\boldsymbol{x})\\ &=\sum_{i\neq j}P(\omega_j|\boldsymbol{x})\\ &=1-P(\omega_i|\boldsymbol{x}) \end{align} \] 选择最小误差率决策,那么得到朴素贝叶斯分类的判别函数: \[ h(\boldsymbol{x})_{nb}=\arg\max_{\omega\in \Omega}{P(\omega)\prod^d_{i=1}P(x_i|\omega)} \] 即最大化后验概率。
朴素贝叶斯分类器的训练器的训练过程就是基于训练集 \(D\) 估计类先验概率 \(P(\omega)\) 并为每个属性估计条件概率 \(P(x_i|\omega)\)。
令 \(D_\omega\) 表示训练集 \(D\) 中 \(\omega\) 类样本组合的集合,若有重组的独立同分布样本,则可以容易估计出类先验概率: \[ P(\omega)=\frac{|D_\omega|}{D} \] 对离散属性而言,令 \(D_{\omega,x_i}\) 表示 \(D_\omega\) 中在第 \(i\) 个属性上取值为 \(x_i\) 的样本组成的集合,则条件概率 \(P(x_i|\omega)\) 可估计为 \[ P(x_i|\omega)=\frac{|D_{\omega,x_i}|}{|D_\omega|} \] 对于连续属性而言,可以考虑概率密度函数,假设 \(p(x_i|\omega)\sim N(\mu_{\omega,i},\sigma_{\omega,i}^2)\),则 \[ P(x_i|\omega)=p(x_i|\omega) \] 此时 \(p(\boldsymbol{x}|\omega)\sim N(\boldsymbol{\mu}_\omega,\boldsymbol{\sigma}_\omega^2)\),则参数的极大似然估计为 \[ \boldsymbol{\mu}_\omega=\frac{1}{|D_\omega|}\sum_{\boldsymbol{x}\in D_\omega}\boldsymbol{x}\\ \boldsymbol{\sigma}_\omega^2=\frac{1}{|D_\omega|}\sum_{\boldsymbol{x}\in D_\omega}(\boldsymbol{x}-\boldsymbol{\mu}_\omega)^2\\ \]
\((\boldsymbol{x}-\boldsymbol{\mu}_\omega)^2\) 表示向量积,即 \((\boldsymbol{x}-\boldsymbol{\mu}_\omega)(\boldsymbol{x}-\boldsymbol{\mu}_\omega)^T\)
正态分布下的贝叶斯分类
朴素贝叶斯分类过于简单,实际情况中无法满足属性条件独立性假设,往往属性之间具有相关性。
协方差
在统计学中,方差是用来度量单个随机变量的离散程度,而协方差一般用来刻画两个随机变量的相似程度(值越大越相似)。
方差的计算公式如下 \[ \sigma^2_x=\frac{1}{n}\sum^n_{i=1}(x_i-\bar{x})^2 \] 其中,\(n\) 表示样本量,\(\bar{x}\) 表示这一组随机数据的均值。
在此基础上,协方差的计算公式定义如下 \[ \sigma(x,y)=\frac{1}{n}\sum^n_{i=1}(x_i-\bar{x})(y_i-\bar{y}) \] 其中,\(\bar{x},\bar{y}\) 分别表示两个随机变量所对应的观测样本均值,由此可知,方差 \(\sigma_x^2\) 可视作随机变量 \(x\) 关于其自身的协方差 \(\sigma(x,x)\)。
给定 \(d\) 组随机变量(特征向量)\(\boldsymbol{x}_k,k=1,2,\cdots,d\),则这些随机变量的方差为 \[ \sigma(\boldsymbol{x}_k,\boldsymbol{x}_k)=\frac{1}{n}\sum^n_{i=1}(x_{ki}-\bar{x}_k)^2,k=1,2,\cdots,d \] 其中 \(x_{ki}\) 代表特征向量的第 \(i\) 个维度的值,\(\bar{x}_k\) 代表该维度下的平均值。
而协方差为 \[ \sigma(\boldsymbol{x}_m,\boldsymbol{x}_k)=\frac{1}{n}\sum^n_{i=1}(x_{mi}-\bar{x}_m)(x_{ki}-\bar{x}_k),k=1,2,\cdots,d \] 因此,协方差矩阵定义为 \[ \Sigma=\left[\begin{array}{ccc} \sigma\left(x_{1}, x_{1}\right) & \cdots & \sigma\left(x_{1}, x_{d}\right) \\ \vdots & \ddots & \vdots \\ \sigma\left(x_{d}, x_{1}\right) & \cdots & \sigma\left(x_{d}, x_{d}\right) \end{array}\right] \in \mathbb{R}^{d \times d} \] 其中对角线上的元素为各随机变量的方差,非对角线上的元素为两两随机变量之间的协方差,且 \(\Sigma\) 为对称矩阵。
一维正态分布
对于一维正态分布,有密度函数 \[ p(x)=\frac{1}{\sqrt{2\pi}\sigma}\exp{[{-\frac{1}{2}(\frac{x-\mu}{\sigma})^2}]} \] 其中均值 \[ \mu=E(x)=\int^{+\infty}_{-\infty}xp(x)\mathrm{d}x \] 方差 \[ \sigma^2=E[(x-\mu)^2]=\int^{+\infty}_{-\infty}(x-\mu)^2p(x)\mathrm{d}x \] 其中一维正态分布也可以简写为 \(p(x)\sim N(\mu,\sigma^2)\)。
一种分布的熵由下式给出 \[ H(p(x))=-\int p(x)\ln{p(x)}\mathrm{d}x \] 单位为奈特,如果对数换为 \(\log_2\),则单位为比特。
可以证明正态分布在所有具有给定均值和方差的分布中具有最大熵。由中心极限定理所述,大量的小的、独立地随机分布的总和等效为正态分布。由于所有模式——鱼、手写字符、语音——都可以看成是由大量随机过程所组成的某个理想的模式或原型模式,所以实际上通常会选择正态分布作为实际的概率分布。
多维正态分布
设 \(d\) 维特征向量 \[ \boldsymbol{x}=(x_1,x_2,\cdots,x_d)^T \] 则 \(d\) 维正态分布定义为 \[ p(\boldsymbol{x})=\frac{1}{(2\pi)^{d/2}|\Sigma|^{1/2}}\exp[-\frac{1}{2}(\boldsymbol{x}-\boldsymbol{\mu})^T\Sigma^{-1}(\boldsymbol{x}-\boldsymbol{\mu})] \] 其中 \(\Sigma\) 是 \(d\) 维的协方差矩阵,\(|\Sigma|\) 代表行列式的值,\(\Sigma^{-1}\) 代表矩阵的逆,\((\boldsymbol{x}-\boldsymbol{\mu})^T\) 表示矩阵的转置(在这里是变为行向量)。
通常简写为 \[ p(\boldsymbol{x})=N(\boldsymbol{\mu},\boldsymbol{\Sigma}) \] 其中均值 \[ \boldsymbol{\mu}=E(\boldsymbol{x})=\int\boldsymbol{x}p(\boldsymbol{x})\mathrm{d}\boldsymbol{x} \] 协方差矩阵 \[ \Sigma=E[(\boldsymbol{x}-\boldsymbol{\mu})(\boldsymbol{x}-\boldsymbol{\mu})^T]=\int (\boldsymbol{x}-\boldsymbol{\mu})(\boldsymbol{x}-\boldsymbol{\mu})^Tp(\boldsymbol{x})\mathrm{d}\boldsymbol{x} \] 其中 \((\boldsymbol{x}-\boldsymbol{\mu})(\boldsymbol{x}-\boldsymbol{\mu})^T\) 表示求向量内积。
其中某个向量的均值可以通过其属性的均值获得,即 \[ \begin{align} \mu_i&=E(x_i)\\ \sigma_{ij}^2&=E[(x_i-\mu_i)(x_j-\mu_j)]\\ &=\iint(x_i-\mu_i)(x_j-\mu_j)p(x_i,x_j)\mathrm{d}{x_i}\mathrm{d}{x_j} \end{align} \] 当 \(i=j\) 时(对角线元素),\(\sigma_{ij}\) 反映样本 \(x_i\) 在 \(d\) 维特征空间各方向的发散程度;
当 \(i\neq j\) 时,\(\sigma_{ij}\) 反映各特征间的统计相关性。
这里需要严格限定 \(\Sigma\) 是正定矩阵,使得其行列式为正值。
分类器
设各类样本的类概率密度均满足正态分布,即 \[ p(\boldsymbol{x}|\omega_i)\sim N(\boldsymbol{\mu},\boldsymbol{\Sigma}) \] 根据最小误差概率决策,判别函数为 \[ g_i(\boldsymbol{x})=p(\boldsymbol{x}|\omega_i)p(\omega_i)=\max_{1\leq j\leq c}{(p(\boldsymbol{x}|\omega_j),p(\omega_j))} \] 或者使用 \[ \begin{align} g_i(\boldsymbol{x})&=\ln{p(\boldsymbol{x}|\omega_i)}+\ln{p(\omega_i)}\\ &=-\frac{d}{2}\ln{2\pi}-\frac{1}{2}\ln{|\Sigma_i|}-\frac{1}{2}(\boldsymbol{x}-\boldsymbol{\mu}_i)^T\Sigma^{-1}_i(\boldsymbol{x}-\boldsymbol{\mu}_i)+\ln{P(\omega_i)} \end{align} \] 分以下三种情况讨论决策结果。
情况一:\(\Sigma=\sigma^2I\)
- 各类协方差矩阵相等,\(\Sigma_i=\Sigma_j=\Sigma\)
- 各特征统计独立,\(\sigma_{ij}^2=0,i\neq j\)
- 样本各方向的发散程度一致 \(\sigma_{ij}^2=\sigma^2,i=j\)
即 \[ \Sigma=\begin{bmatrix} \sigma^2 & 0 & \cdots & 0\\ 0 & \sigma^2 & \cdots & 0\\ \cdots & \cdots & \cdots & \cdots\\ 0 & 0 & \cdots & \sigma^2 \end{bmatrix} \] 此时 \(\Sigma=\sigma^2I\),故 \(\Sigma^{-1}=\frac{1}{\sigma^2}I\),其中 \(I\) 为单位矩阵。
故判别函数化简为 \[ \begin{align} g_i(\boldsymbol{x})&=-\frac{(\boldsymbol{x}-\boldsymbol{\mu}_i)^T(\boldsymbol{x}-\boldsymbol{\mu}_i)}{2\sigma^2}+\ln p(\omega_i)\\ &=-\frac{\begin{Vmatrix} \boldsymbol{x}-\boldsymbol{\mu}_i \end{Vmatrix}^2}{2\sigma^2}+\ln p(\omega_i) \end{align} \] 其中 \(\begin{Vmatrix} \boldsymbol{x}-\boldsymbol{\mu}_i \end{Vmatrix}\) 是求欧氏距离,即欧几里得范数。
故在此种决策函数下,只需计算 \(\boldsymbol{x}\) 到各类样本均值 \(\boldsymbol{\mu}_i\) 的范数,选择范数最小(在空间中称为距离最近)的类别即可。
情况一也称作最小距离分类器。
对判别函数重整,有 \[ g_i(\boldsymbol{x})=\frac{1}{2\sigma^2}(\begin{Vmatrix}\boldsymbol{x}\end{Vmatrix}^2-2\boldsymbol{\mu}_i^T\boldsymbol{x}+\begin{Vmatrix}\boldsymbol{\mu}\end{Vmatrix}^2)+\ln{p(\omega_i)} \] 其中 \(\begin{Vmatrix}\boldsymbol{x}\end{Vmatrix}^2\) 对于任意 \(i\) 是相等的,于是乎我们可以把上式等价于 \[ g_i(\boldsymbol{x})=\boldsymbol{w}_i^T \boldsymbol{x}+\omega_{i0} \] 其中 \[ \boldsymbol{w}_i=\frac{1}{\sigma ^2}\boldsymbol{\mu}_i\\ \omega_{i0}=-\frac{1}{2\sigma^2}\begin{Vmatrix}\boldsymbol{\mu}\end{Vmatrix}^2+\ln{p(\omega_i)} \] \(\omega_{i0}\) 又称作第 \(i\) 个方向的阈值或偏置。
使用线性判别函数的分类器称为“线性机器”。这类分类器有许多有趣的理论性质。
此处只需注意到一个线性机器的判定面是一些超平面,它们是由两类问题中可获得最大后验概率的线性方程 \(g_i(\boldsymbol{x})=g_j(\boldsymbol{x})\) 来确定。
上式可写为 \[ \boldsymbol{w}^T(\boldsymbol{x}-\boldsymbol{x}_0)=0 \] 其中 \[ \boldsymbol{w}=\boldsymbol{\mu}_i-\boldsymbol{\mu}_j \] 且 \[ \mathbf{x}_{0}=\frac{1}{2}\left(\boldsymbol{\mu}_{i}+\boldsymbol{\mu}_{j}\right)-\frac{\sigma^{2}}{\left\|\boldsymbol{\mu}_{i}-\boldsymbol{\mu}_{j}\right\|^{2}} \ln \frac{P\left(\omega_{i}\right)}{P\left(\omega_{j}\right)}\left(\boldsymbol{\mu}_{i}-\boldsymbol{\mu}_{j}\right) \] 此方程定义了一个通过 \(\boldsymbol{x}_0\) 且与向量 \(\boldsymbol{w}\) 正交的超平面。
如果 \(\sigma^2\) 相对于范数的平方较小,那么判决边界的位置相对于确切的先验概率值并不敏感。
情况二:\(\Sigma_i=\Sigma_j=\Sigma\)
- 各类方差相同,\(\Sigma_i=\Sigma_j=\Sigma\)
可以证明,此时判别函数仍满足线性关系,即 \[ g_i(\boldsymbol{x})=\boldsymbol{w}_i^T\boldsymbol{x}+\omega_{i0} \]
情况三:\(\Sigma_i\neq \Sigma_j\)
- \(\Sigma_i\neq \Sigma_j\)
此时判别函数为 \[ g_i(\boldsymbol{x})=\boldsymbol{x}^TA_i\boldsymbol{x}+\boldsymbol{w}_i^T+\omega_{i0} \] 此分类器为非线性分类器(二次型分类器)。
实际计算
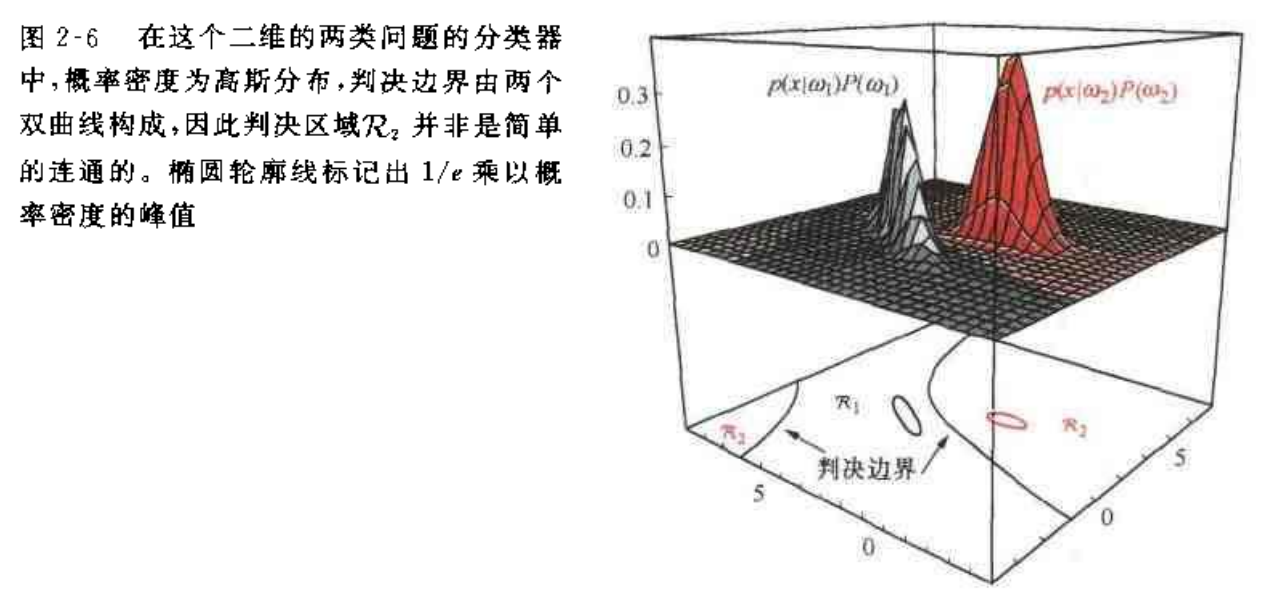
两类高斯分布所计算出的贝叶斯判决边界如下,每一类都基于 4 个数据点。
以 \(\omega_1\) 表示 4 个黑点的集合,\(\omega_2\) 表示红点集合。
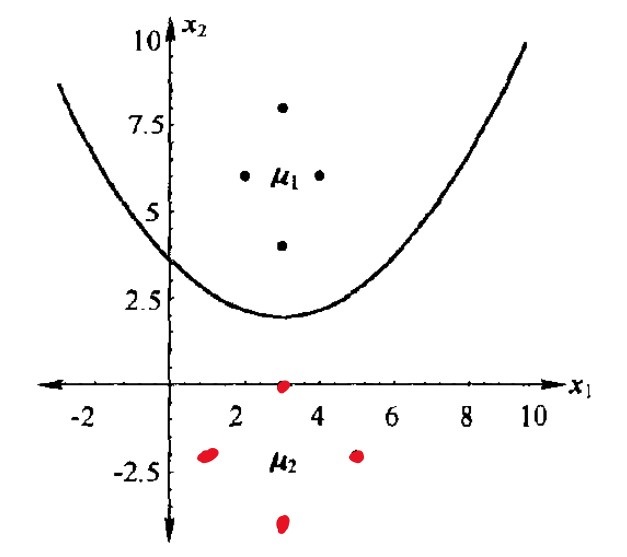
由图可知,\(\omega_1\) 的特征向量矩阵为 \[ X=\begin{bmatrix} 2 & 3 & 3 & 4\\ 6 & 8 & 4 & 6 \end{bmatrix} \] 可知特征向量维度 \(d=2\)
由均值公式 \[ \mu_k=\frac{1}{4}\sum^4_{i=1} x_{ki},k=1,2 \] 得均值向量为 \[ \boldsymbol{\mu}=\begin{bmatrix} 3\\ 6 \end{bmatrix} \] 由协方差公式 \[ \sigma(\boldsymbol{x}_k,\boldsymbol{x}_k)=\frac{1}{n}\sum^n_{i=1}(x_{ki}-\bar{x}_k)^2,k=1,2,\cdots,d \] 得协方差为 \[ \begin{align} \sigma\left(x_{1}, x_{1}\right)&=\frac{1}{4}\left\{\left(x_{11}-\bar{x}_{1}\right)\left(x_{11}-\bar{x}_{1}\right)+\left(x_{12}-\bar{x}_{1}\right)\left(x_{12}-\bar{x}_{1}\right)+\left(x_{13}-\bar{x}_{1}\right)\left(x_{13}-\bar{x}_{1}\right)+\left(x_{14}-\bar{x}_{1}\right)\left(x_{14}-\bar{x}_{1}\right)\right\} \\ &=\frac{1}{4}\{(2-3)(2-3)+(3-3)(3-3)+(3-3)(3-3)+(4-3)(4-3)\}\\ &=\frac{1}{2} \end{align} \]
此处 \(x_1=\begin{bmatrix}2&3&3&6\end{bmatrix},x_{11}=2,x_{12}=3,\bar{x}_1=3\),同时忽略其他协方差的计算。
同理可得,协方差矩阵为 \[ \Sigma=\begin{bmatrix} \frac{1}{2} & 0\\ 0 & 2 \end{bmatrix} \] 对于另一组特征向量 \[ X=\begin{bmatrix} 1 & 3 & 3 & 5\\ -2 & 0 & -4 & -2 \end{bmatrix} \] 同理可得均值和方差。
记第一组数据的均值为 \(\mu_1\),协方差矩阵为 \(\Sigma_1\);第二组数据的均值为 \(\mu_2\),协方差矩阵为 \(\Sigma_2\): \[ \boldsymbol{\mu}_1=\begin{bmatrix} 3\\ 6 \end{bmatrix}, \boldsymbol{\mu}_2=\begin{bmatrix} 3\\ -2 \end{bmatrix} \\ \Sigma_1=\begin{bmatrix} \frac{1}{2} & 0\\ 0 & 2 \end{bmatrix}, \Sigma_2=\begin{bmatrix} 2 & 0\\ 0 & 2 \end{bmatrix} \] 可得逆矩为 \[ \Sigma_1^{-1}=\begin{bmatrix} 2 & 0\\ 0 & \frac{1}{2} \end{bmatrix}, \Sigma_2^{-1}=\begin{bmatrix} \frac{1}{2} & 0\\ 0 & \frac{1}{2} \end{bmatrix} \] 假定两类分布的先验概率相等,即 \(P(\omega_1)=P(\omega_2)=0.5\),代入后可得 \(g_1(\boldsymbol{x})=g_2(\boldsymbol{x})\) 时的判决边界为 \[ x_2=3.514-1.125x_1+0.1875x_1^2 \]
这里由于各类协方差矩阵各不相同,于是套用情况三的公式
实际应用
拼写纠错检查
当用户输入了一个不在字典中的单词,我们需要去猜测:“这个家伙到底真正想输入的单词是什么呢?”用形式化的语言来叙述,就是我们需要求得: \[ P(\text{我们猜测他想输入的单词}|\text{他实际输入的单词}) \] 比如用户输入thew,那么猜测他到底想输入the,还是thaw,还是其他的单词?到底哪一个单词的可能性比较大?这时候我们就可以用贝叶斯去求出每个词语的可能性。
不妨把我们的猜测记为 \(h_1,h_2,\cdots,h_n\),他们都属于一个有限且离散的猜测空间H(单词总共就只有那么多,\(H\) 代表 hypothesis),将用户实际输入的单词记为 \(D\)(\(D\) 代表 data,即观测数据),于是问题转为:
\(P(\text{我们的猜测1}|\text{他实际输入的单词})\) 可以表示为 \(P(h_1|D)\),同理对于猜测2,则表示为 \(P(h_2|D)\),我们需要计算这些概率值,取最大值。
将所有猜测统一记为 \(P(H|D)\),运用贝叶斯公式可以得到 \[ P(H|D)=\frac{P(H)P(D|H)}{P(D)} \] 由于证据因子 \(P(D)\) 对我们的决策无影响,故计算时将公式简化为 \[ P(H|D)\propto P(H)P(D|H) \] 即用户实际想输入 the 的可能性大小取决于 the 本身在词汇表中被使用的可能性(频繁程度)大小和想打 the 却打成 thew 的可能性大小(似然)的乘积。
抽象理解为给定观测数据,猜测是好是坏取决于“这个猜测本身独立的可能性大小”(先验概率)和“这个猜测生成我们观测到的数据的可能性大小”(似然)的乘积。
有两种模型解决该问题:
- 最大似然:最符合观测数据的最有优势(即 \(P(D|H)\) 最大)
- 奥卡姆剃刀:先验概率 \(P(H)\) 较大的模型有较大的优势。
医生诊断
一个两类识别问题:医生根据病人血液中白细胞的浓度来判断病人是否患血液病。
根据医学知识和以往的经验,医生知道(先验知识):
- 患病的人,白细胞的浓度服从均值2000,方差1000的正态分布;未患病的人,白细胞的浓度服从均值7000,方差3000的正态分布
- 一般人群中,患病的人数比例为0.5%
当一个人的白细胞浓度是3100,医生应该做出怎样的判断?
用 \(\Omega\) 表示分类集合,有 \(\omega_1\) 表示患病,\(\omega_2\) 表示未患病;
用 \(x\) 表示"白细胞浓度"这个随机变量,即选择其作为特征。
由先验知识我们可以得到先验概率:
- \(P(\omega_1)=0.5\%,P(\omega_2)=99.5\%\)
- 白细胞浓度在两种类别下的类条件概率密度:\(p(x|\omega_1)\sim N(2000,1000),p(x|\omega_2)\sim N(7000,3000)\)
查表可以得到类条件概率: \[ P(3100|\omega_1)=2.1785\times10^{-4}\\ P(3100|\omega_2)=5.7123\times10^{-5}\\ \] 根据贝叶斯公式,计算得到后验概率: \[ \begin{align} P(\omega_1|3100)&=1.9\%\\ P(\omega_2|3100)&=98.1\% \end{align} \] 故判决为 \(\omega_2\),即医生诊断为:未患病,体征正常。