模式识别-线性判别函数笔记
模式识别
二类线性判别函数
线性判别函数有许多优势,其中一个优势是便于分析和计算。在之前的贝叶斯决策中笔记中曾简单涉及到的贝叶斯判别函数,当满足某些情况时,判别函数是线性的。
我们抽象出这种线性特质,即定义线性判别函数形如 \[ g(\boldsymbol{x})=\boldsymbol{w}^T\boldsymbol{x}+w_0 \] 其中,\(\boldsymbol{w}\) 是权向量(weight vector),决定了特征向量中每个属性在判别函数中的占比;\(w_0\) 是偏置(bias),决定了该线性判别函数的位置。
在这其中,二类线性判别函数在实战中常被用到,故以下仅讨论二类线性判别函数的问题,其中可能往往都以二维二类线性判别函数为例。
性质一:权向量 \(\boldsymbol{w}\) 与判别面上任意一个向量正交,即权向量决定了判别边界的方向。
对于一个二维二类线性判别函数,假设判别面上存在任意两点 \(x_1,x_2\),那么其满足 \[ \boldsymbol{w}^Tx_1+w_0=\boldsymbol{w}^Tx_2+w_0 \] 可以改写成 \[ \boldsymbol{w}^T(x_1-x_2)=0 \] 即权向量与判别面上的任意一向量正交(相互垂直)。
可以推广到,权向量同时也与超平面(多维情况下的判别边界)上的任意向量正交。
性质二:判别函数 \(g(\boldsymbol{x})\) 与特征向量 \(\boldsymbol{x}\) 到判决边界(判决面)的距离成正比。
我们定义 \(r\) 为特征空间中某点 \(\boldsymbol{x}\) 到判决边界(超平面)的算数距离(正代表在超平面正侧,反之亦然);使用 \(\frac{\boldsymbol{w}}{\|\boldsymbol{w}\|}\) 来表示单位向量,那么特征向量 \(\boldsymbol{x}\) 可以表示成 \[ \boldsymbol{x}=\boldsymbol{x}_p+r\frac{\boldsymbol{w}}{\|\boldsymbol{w}\|} \] 其中 \(\boldsymbol{x}_p\) 是特征向量在判决边界上的投影,有 \(g(\boldsymbol{x}_p)=0\)。
代入判决函数,可以得到 \[ \boldsymbol{w}^T\boldsymbol{x}+w_0=r\|\boldsymbol{w}\| \] 即 \[ r=\frac{g(\boldsymbol{x})}{\|\boldsymbol{w}\|} \]
由性质二,我们定义
\(g(\boldsymbol{x})>0\) 称作判决边界(判决面)的正面;\(g(\boldsymbol{x})<0\) 称作判决边界的反面;\(g(\boldsymbol{x})=0\) 则 \(\boldsymbol{x}\) 是在判决边界上。
性质三:线性判别函数中的偏置 \(w_0\) 表征了原点到判别边界的距离。若 \(w_0>0\),则原点位于判别边界的正面;反之亦然。
我们显然可以得知 \[ g(\boldsymbol{0})=w_0 \] 故结论显然。
多类情况下的线性判别函数
情况一
如果每个模式类均可用一个单独的线性判别边界与其余模式类分开,那么此时仅需
\(c\) 个判别函数,且具有以下性质:
\[
\begin{cases}
g_i(\boldsymbol{x})>0 & \boldsymbol{x}\in\omega_i\\
g_i(\boldsymbol{x})<0 & \boldsymbol{x}\notin\omega_i
\end{cases}
\] 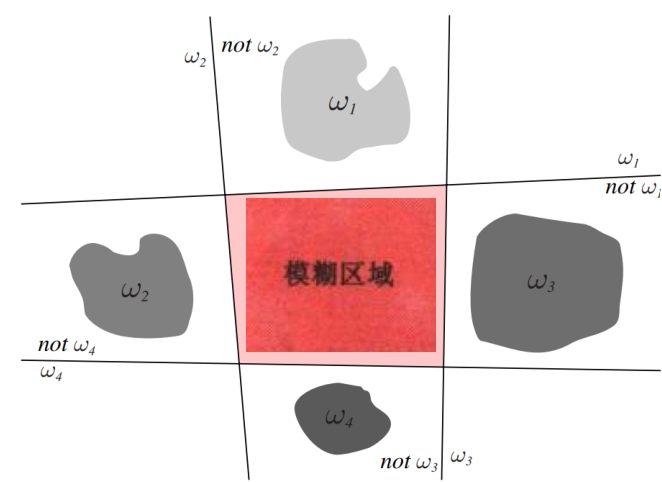
当关于特征向量有 \(\boldsymbol{x}\) 满足 \(g_i(\boldsymbol{x})>0\) 且所有 \(g_j{(\boldsymbol{x})}<0\) 时,判决为 \(\omega_i\);反之不作判决。
故可以发现,该方法存在失效区或不定区,在图中表现为模糊区域,即存在多于一个判别函数大于 0 或所有的判别函数都小于 0。
情况二
如果线性判别边界只能将模式类两两分开,那么需要 \(c(c-1)/2\) 个判别函数,且具有以下性质 \[
\begin{cases}
g_{ij}(\boldsymbol{x})>0 & \boldsymbol{x}\in\omega_i\\
g_{ij}(\boldsymbol{x})<0 & \boldsymbol{x}\in\omega_j
\end{cases}
\] 显然,应有 \[
g_{ij}(\boldsymbol{x})=-g_{ji}(\boldsymbol{x})
\] 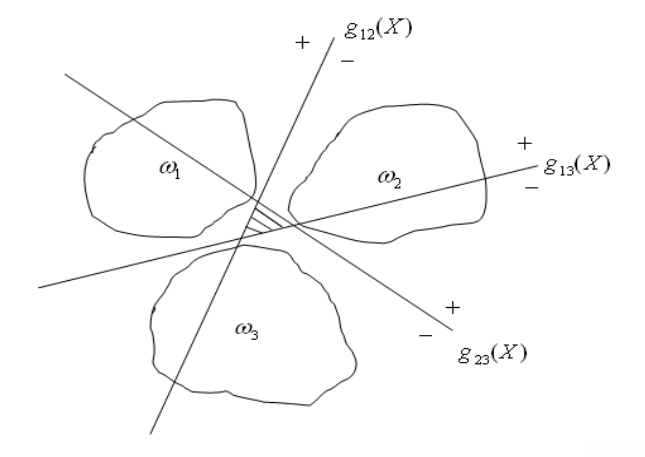
当特征向量 \(\boldsymbol{x}\) 满足对所有的 \(j\neq i\) 均有 \(g_{ij}(\boldsymbol{x})>0\),那么判决为 \(\omega_i\),反之不判决。
同理,该种方式任然存在不定区,采用拒识策略。
拒识策略即不进行判决。
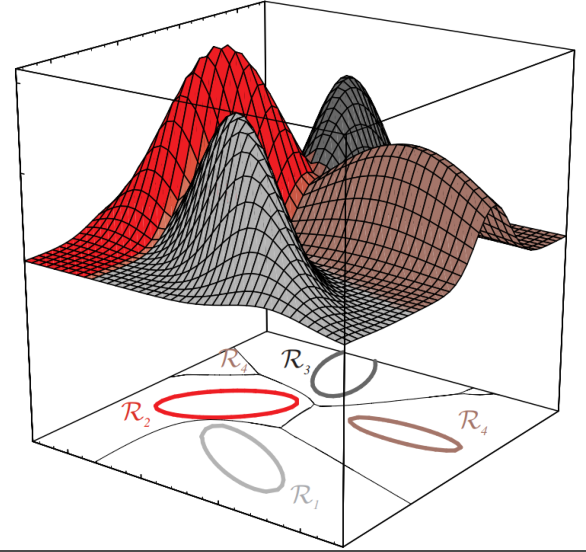
情况三
不考虑二类问题的线性判别函数,采用 \(c\) 个线性判别函数进行分类,但不同于情况一,此时的识别准则变更为
对于所有的 \(i\neq j\),若 \(g_i(\boldsymbol{x})>g_j(\boldsymbol{x})\),则判决为 \(\omega_i\)。
该种方法实际上是将特征空间划分为 \(c\) 个判决区域 \(\{R_1,R_2,\cdots,R_c\}\),在判决区域 \(R_i\) 内,\(g_i(\boldsymbol{x})\) 具有最大的函数值。
如果 \(R_i\) 与 \(R_j\) 相邻,则决策面是方程 \(g_i(\boldsymbol{x})=g_j(\boldsymbol{x})\) 的一部分。
因为决策面还有可能与其他模式冲突,所以这里描述为一部分。
但该种方法的优点是不存在不定区。
总结
由上述情况可知,多类情况实际上可以转化为二类问题进行处理,故我们仅需研究二类问题中的线性判别函数即可。
线性判别函数的学习算法
增广化
我们知道线性判别函数一般具有以下形式 \[ g(\boldsymbol{x})=\boldsymbol{w}^T\boldsymbol{x}+w_0=w_1x_1+w_2x_2+\cdots+w_dx_d+w_0 \] 不妨我们设 \[ \boldsymbol{a}=\begin{bmatrix} w_0\\ w_1\\ \vdots\\ w_d \end{bmatrix},\boldsymbol{y}=\begin{bmatrix} 1\\ x_1\\ \vdots\\ x_d \end{bmatrix} \] 将原判别函数写成 \[ g(\boldsymbol{y})=\boldsymbol{a}^T\boldsymbol{y} \] 其中 \(\boldsymbol{a},\boldsymbol{y}\) 的维度均为 \(d+1\) 维。
我们把这种化简称作增广化。
比如说我们有两类样本 \[ \omega_1:\boldsymbol{x}_{11}=(0,0),\boldsymbol{x}_{12}=(0,1)\\ \omega_2:\boldsymbol{x}_{21}=(1,0),\boldsymbol{x}_{22}=(1,1)\\ \] 我们对其进行增广化,得到 \[ \omega_1:\boldsymbol{x}_{11}=(1,0,0),\boldsymbol{x}_{12}=(1,0,1)\\ \omega_2:\boldsymbol{x}_{21}=(1,1,0),\boldsymbol{x}_{22}=(1,1,1)\\ \]
增广化的结果不唯一,比如说也可以存在增广化结果为 \(\boldsymbol{x}_{11}=(0,0,1)\)
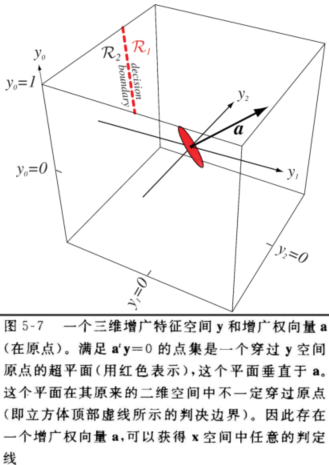
增广化后的线性判别函数,判别面是过原点的超平面。
对于过原点的一个判决边界,简化了我们计算权向量的过程。
同时对于二类问题,有
若 \(g(\boldsymbol{y})=\boldsymbol{a}^T\boldsymbol{y}>0\),则 \(\boldsymbol{y}\in\omega_1\),即 \(\boldsymbol{x}\in\omega_1\);
若 \(g(\boldsymbol{y})=\boldsymbol{a}^T\boldsymbol{y}<0\),则 \(\boldsymbol{y}\in\omega_2\),即 \(\boldsymbol{x}\in\omega_2\)。
规范化
沿着上面的增广化,比如说对于一个一维二类线性判别函数,它增广化后的判决面(二维空间)是权空间中的一条直线,这条直线将不同类别的向量区分开。
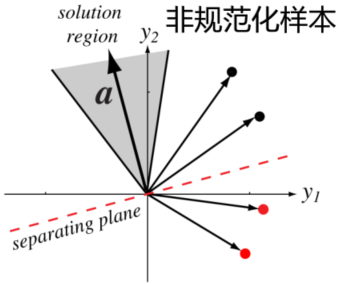
于是乎我们可以得到在某个范围内的权向量 \(\boldsymbol{a}\) 构造出的直线都能满足这个条件,我们称这个区域叫做解区域(solution region)。
但在计算上,验证某些向量是否被这条直线错误的区别是繁琐的,但学习过程中却又需要大量验证某些向量是否被错误分类了,故我们需要对这些向量进行规范化。
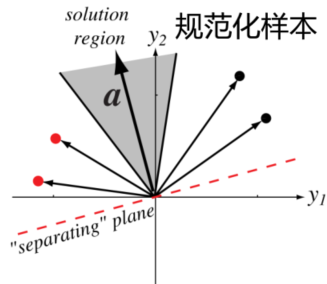
我们不妨令对于所有 \(\boldsymbol{y}\in
\omega_2\) 都有 \[
\boldsymbol{y}=-\boldsymbol{y}
\] 这样,我们就使得所有的正确分类都有 \[
g(\boldsymbol{y})>0
\] 
当我们需要判断某个向量是否被权向量错误分类时,仅需有如下规则:
若 \(g(\boldsymbol{y})>0\),则 \(\boldsymbol{y}\) 被正确分类;
若 \(g(\boldsymbol{y})<0\),则 \(\boldsymbol{y}\) 被错误分类。
这极大的简化了运算过程。
跟随上文,我们有如下被增广化后的向量 \[ \omega_1:\boldsymbol{x}_{11}=(1,0,0),\boldsymbol{x}_{12}=(1,0,1)\\ \omega_2:\boldsymbol{x}_{21}=(1,1,0),\boldsymbol{x}_{22}=(1,1,1)\\ \] 对其进行规范化,有 \[ \begin{align} &\omega_1:\boldsymbol{x}_{11}=(1,0,0),\boldsymbol{x}_{12}=(1,0,1)\\ &\omega_2:\boldsymbol{x}_{21}=(-1,-1,0),\boldsymbol{x}_{22}=(-1,-1,-1) \end{align} \] 对于满足所有上述条件的向量 \(\boldsymbol{a}\) 都称作是解向量,也可以发现,每个学习样本都对解向量做了限制,但解向量也不唯一。
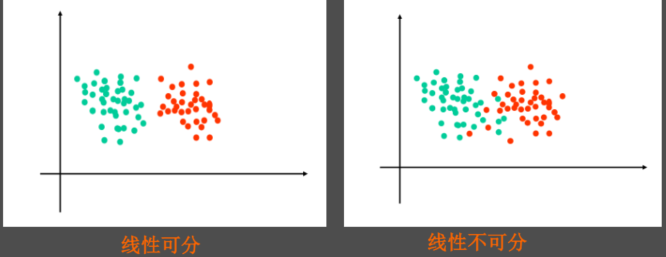
如果存在解向量 \(\boldsymbol{a}\) 使得二类样本分类正确,则样本被称作是线性可分的;反之称作线性不可分。
学习算法原理
要求解解向量 \(\boldsymbol{a}\),根据上面的理论我们需要通过学习样本来求解不等式组 \[ \boldsymbol{a}^T\boldsymbol{y}_i>0,i=1,2,\cdots,n \] 但当权向量维度很大,学习样本足够多时,显然直接求解不等式组是困难的。
同时我们希望在样本线性可分时,得到的判别函数能够将所有的训练样本正确分类;在样本线性不可分时,得到的判别函数产生错误的概率最小(或者称误差最小)。
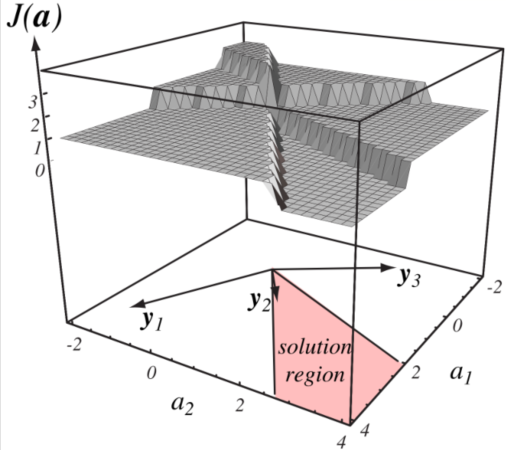
为转化困难问题为简单问题,我们定义一个标量函数 \(J(\boldsymbol{a})\),如果 \(J(\boldsymbol{a})\) 的值越小,则判别面的分割质量越高。
标量函数指的是输出值为标量的函数,同时有时也称准则函数。
那么求解解向量 \(\boldsymbol{a}\) 就变为求解标量函数 \(J(\boldsymbol{a})\) 极小值(最小值)的问题。
那么如何定义合理的标量函数 \(J(\boldsymbol{a})\) 能更准确的表示它的含义成为了新问题。
最直观的准则函数的定义是最少错分样本数准则,即令 \(J(\boldsymbol{a})\) 为样本集合中被错误分类的样本数。
但我们可以直观的发现,此时 \(J(\boldsymbol{a})\) 是一个分段函数,对于这种函数在性质上是不被喜欢的,因为它不光滑,无法用现有的高效的数学工具求解函数极小值,对计算机来说可能将要遍历所有的函数值才能找到它的极小值。
因此,一个更好的选择是错分样本到判别面的距离之和准则,也称作感知器准则,感知器准则函数的定义如下 \[ J_p(\boldsymbol{a})=\sum_{\boldsymbol{y}\in Y_e}(-\boldsymbol{a}^T\boldsymbol{y}) \] 即选择了某个解向量 \(\boldsymbol{a}\) 后,被错分的样本到判别面的距离之和,其中 \(Y_e\) 代表所有被错分向量的集合。
这里的计算是规范化后的计算,所以需要加个负号,这样仅需关注距离和。
此时满足 \(J_p(\boldsymbol{a})\geq 0\),其存在极小值使得样本无错分或错分误差最小。
当且仅当样本线性可分时,极小值取得 0。
梯度下降算法
梯度下降算法是一个用来求函数极小值的算法,仅需要知道函数在各点的导数,便可以快速迭代找到极小值点。
需要注意的是,梯度下降算法仅适用于局部连续可导函数。
原理
对于某一个局部连续可导函数 \(f(x)\)。
- (随机)选取一个初始值 \(x_0\);
- 计算 \(f'(x_0)\),如果值为负则增加 \(x_0\);如果值为正则减小 \(x_0\);
- 使 \(x_1=x_0-\eta f'(x_0)\),代入 \(x_1\) 重复第二步,直到 \(|\eta f'(x_{n-1})|<\theta\),\(\theta\) 为临界值(误差值)。
我们也称 \(\eta\) 为学习率。
如果对于多参函数,例如二元函数 \(f(x,y)\),我们选择以某一点的梯度来增长或减小。
因为我们是想让值快速迭代到极小值点处,而梯度是多元函数增长速度最快的方向,则负梯度是多元函数下降速度最快的方向。需要知道,\(\|\nabla J(\boldsymbol{a})\|\) 表示其在 \(\boldsymbol{a}\) 处的变化率的大小,当某点梯度为 \(\boldsymbol{0}\) 时,该点即为 \(J(\boldsymbol{a})\) 的极值点。
即第三步的式子变为 \[ x_n=x_{n-1}-\eta\nabla f(x_{n-1}, y_{n-1})\\ y_n=y_{n-1}-\eta\nabla f(x_{n-1}, y_{n-1}) \] 其中 \[ \nabla f(x_{n-1},y_{n-1})=\begin{bmatrix} \frac{\partial}{\partial x}f(x_{n-1},y_{n-1})\\ \frac{\partial}{\partial y}f(x_{n-1},y_{n-1}) \end{bmatrix} \] 同理如果对于 \(J(\boldsymbol{a})\),有 \[ \nabla J(\boldsymbol{a})=\begin{bmatrix} \frac{\partial}{\partial a_1}\\ \frac{\partial}{\partial a_2}\\ \vdots\\ \frac{\partial}{\partial a_{d+1}}\\ \end{bmatrix}J(\boldsymbol{a}) \] 由于其通过梯度快速下降,故称作梯度下降法。
代码
1 | def f(x): |
优劣
如果 \(\eta\) 过大可能会导致过冲(overshoot)甚至发散,即在极小值两边迭代无法退出循环;\(\eta\) 过小会导致迭代次数过多,浪费算力。所以一般会选择较小但不是特别小的 \(\eta\) 进行梯度下降。
牛顿下降法
基于梯度下降算法和牛顿迭代法进行改进,得到牛顿下降法。
原理
- (随机)选取一个初始值 \(\boldsymbol{x}_0\);
- 计算 \(\nabla f(\boldsymbol{x}_0)\) 和 \(\boldsymbol{H}^{-1}\);
- 使 \(\boldsymbol{x}_1=\boldsymbol{x}_0-\boldsymbol{H}^{-1}\nabla f(\boldsymbol{x}_0)\),代入 \(x_1\) 重复第二步,直到 \(|\boldsymbol{H}^{-1}\nabla f(\boldsymbol{x}_{n-1})|<\theta\),\(\theta\) 为临界值(误差值)。
其中 \(H\) 为海森矩阵。
优劣
牛顿下降法可以更快更准确的进行下降,但反过来计算 \(H\) 的逆矩阵是困难的,所以一般并不会使用牛顿下降法,而是会选择小 \(\eta\) 的梯度下降法。
感知器梯度下降法
在了解了梯度下降算法后,我们回到判别函数 \(g(\boldsymbol{y})\) 的感知器准则函数 \(J_p(\boldsymbol{a})\)。
我们由原式可得,感知器准则函数的梯度为 \[ \nabla J_p=\sum_{\boldsymbol{y}\in Y_e}(-\boldsymbol{y}) \] 那么我们就可以把梯度下降的公式改写为 \[ \boldsymbol{a}_{n+1}=\boldsymbol{a}_{n}+\eta(n)\sum_{\boldsymbol{y}\in Y_e}\boldsymbol{y} \] 结束条件直到 \(|\eta(n)\sum_{\boldsymbol{y}\in Y_e}\boldsymbol{y}|<\theta\)。
代码
1 | import numpy as np |
对于这组样本,仅需 7 次迭代即求得解向量。
固定增量法
感知器梯度下降法需要一次获取所有学习样本,并在迭代算法中一次遍历所有样本。
但实际应用中,有时样本是分批获取的,先训练一部分样本,再训练一部分样本。
固定增量法就是根据以上需求改变的感知器算法,基本思想是每次修改解向量时,不遍历所有样本,而是将学习样本串行输入,每考察一个样本就对解向量 \(a\) 进行一次修改。
即迭代公式为 \[ \boldsymbol{a}_{n+1}=\boldsymbol{a}_{n}+\eta(n)\boldsymbol{y},\boldsymbol{y}\in Y_e \] 结束条件直到 \(|\boldsymbol{a}_{n+1}-\boldsymbol{a}_{n}|<\theta\)。
这样做到了每当解向量分类错误时,就修改解向量,在算法时间复杂度不变的情况下,提升了解向量迭代的效率。
代码
1 | import numpy as np |
对于这组样本,仅需 5 次迭代即求得解向量。
当样本数量增多时,固定增量法的效率优化会更明显。
但固定增量法需要样本满足二类可分条件,否则无法退出迭代。
感知器算法收敛定理:如果训练样本是线性可分的,固定增量法给出的权向量序列必定终止于某个解向量。
变增量梯度算法
单一的 \(\eta\) 会导致效率一定,这个时候就会想使得 \(\eta\) 会随着迭代次数的增加而变化,即 \[ \eta\to\eta(n) \] 我们可以证明得到,当对于所有 \(n\) 有 \[ \eta(n)\geq 0\\ \lim_{m\to\infty}\sum^m_{n=1}\eta(n)=\infty\\ \lim_{m\to\infty}\frac{\sum^m_{n=1}\eta^2(n)}{(\sum^m_{n=1}\eta(n))^2}=0 \] 即正项级数 \(\eta(n)\) 发散,但满足一定条件,那么我们可以证明其迭代算法 \[ \boldsymbol{a}_{n+1}=\boldsymbol{a}_{n}+\eta(n)\boldsymbol{y} \] 是一定收敛的。
这也就是为什么在之前的公式中的学习率都以 \(\eta(n)\) 表示。
带裕量的感知器算法
我们知道,解向量可以有无数多种,解区域也是有边界的,有的时候我们并不想让结果解向量太靠近边界,这样会使得分类严格。
根据固定增量法进行改进,我们加入裕量(margin)来均衡解向量的结果,使得迭代算法变为:
当 \(\boldsymbol{a}^T\boldsymbol{y}_i\leq b\) 时,我们就修改解向量 \[ \boldsymbol{a}_{n+1}=\boldsymbol{a}_{n}+\eta(n)\boldsymbol{y} \]
代码
1 | import numpy as np |
对于这组样本,需 7 次迭代求得解向量。
不难看出,带裕量的感知器算法会使得迭代次数变多,但这是可以控制的,远低于原始的感知器梯度下降法的迭代次数。
同时我们通过添加裕量 \(b=1\),使得判决边界更加趋近于解空间的中间。
Fisher 线性判别
原理
我们知道上面线性判别的方式是增加维度的,这样可以精确的描述一个线性判别函数;同时特征空间的纬度越高,判别的精确度就越高。
但这与此同时也带来一个灾难性的问题,就是高纬度的计算总是复杂和苦难的,因此 Fisher 研究的是降维领域。
由判别函数的式子可知 \[ g(\boldsymbol{x})=\boldsymbol{w}^T\boldsymbol{x} \] 可以理解为特征向量在权向量上的投影,如果说我们对所有的特征向量都做一次投影,应该是下图所示
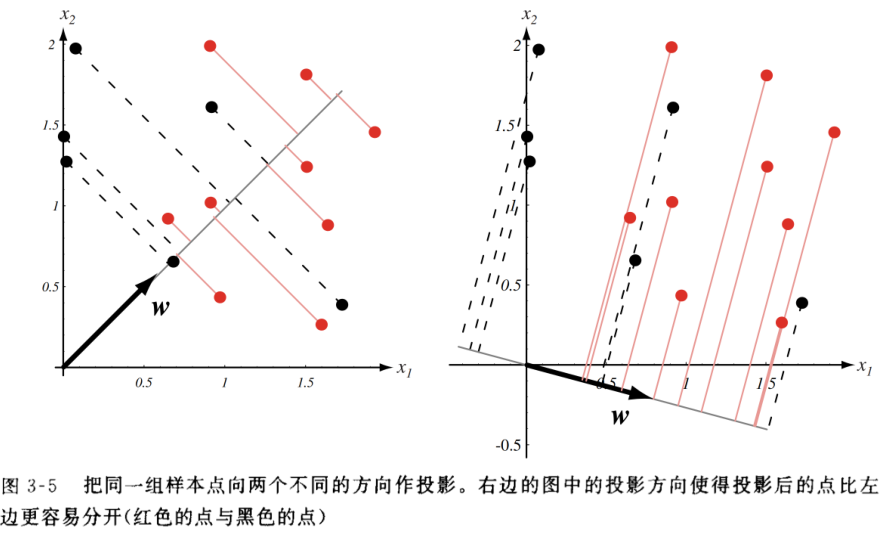
可以很自然的发现,我们将二维的权空间转化到了一维上,此时我们只考虑投影值的大小,而非特征向量的空间分布。
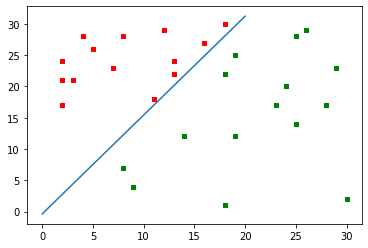
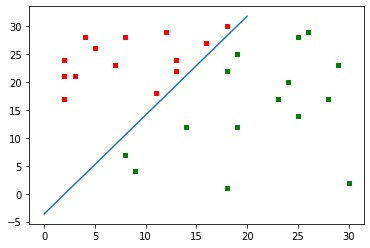
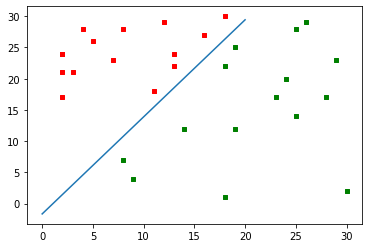
如果说把其转化为一维可视图像,正如图所示
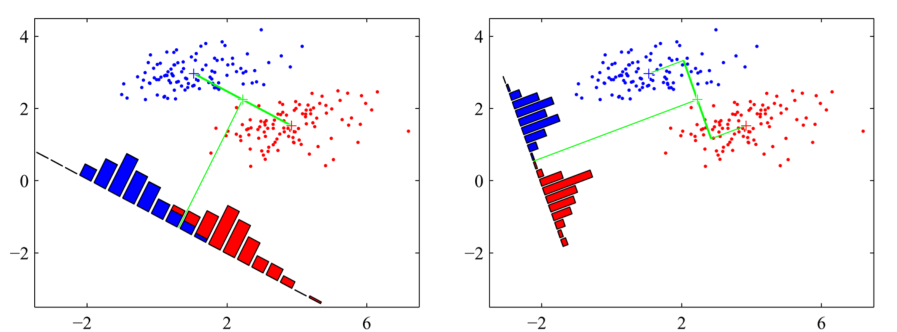
很显然,我们发现不同的权向量会导致一维图像上有不同的结果,左图的权向量显然错分数更多,映射到一维图像上就是有所重合;有图的权向量显然错分数更少,映射到一维图像上就是类间数据有所分离。
自然的,我们会认为,最好的分类是将类间数据进行分离,而类内数据进行聚合,使得两类分离,这就是 Fisher 判别准则。
LDA 基本原理:投影后具有最佳可分离性,即最大的类间距离和最小的类内距离。
我们定义类内距离以投影均值表示,类间距离以投影方差表示,那么想要同时优化两个目标,即想让样本均值之差大,样本方差尽量小,那么定义准则函数 \[ J(\boldsymbol{w})=\frac{|\tilde{m}_1-\tilde{m}_2|}{\tilde{s}_1^2+\tilde{s}_2^2} \] 那么有样本均值 \[ \boldsymbol{m}_i=\frac{1}{n_i}\sum\boldsymbol{x} \] 推导可得 \[ \begin{align} \tilde{m}_i&=\frac{1}{n_i}\sum g(\boldsymbol{x})\\ &=g(\boldsymbol{m}_i) \end{align} \] 同时 \[ \begin{align} \tilde{s}_i^2&=\sum(g(\boldsymbol{x})-\tilde{m}_i)\\ &=\sum\boldsymbol{w}^T(\boldsymbol{x}-\boldsymbol{m}_i)(\boldsymbol{x}-\boldsymbol{m}_i)^T\boldsymbol{w}\\ &=\boldsymbol{w}^T\boldsymbol{S}_i\boldsymbol{w} \end{align} \] 那么总的就有 \[ \begin{align} \tilde{s}_1^2+\tilde{s}_2^2&=\boldsymbol{w}^T(\boldsymbol{S}_1+\boldsymbol{S}_2)\boldsymbol{w}\\ &=\boldsymbol{w}^T\boldsymbol{S}_w\boldsymbol{w}\\ (\tilde{m}_1-\tilde{m}_2)^2&=\boldsymbol{w}^T(\boldsymbol{m}_1-\boldsymbol{m}_2)(\boldsymbol{m}_1-\boldsymbol{m}_2)^T\boldsymbol{w}\\ &=\boldsymbol{w}^T\boldsymbol{S}_B\boldsymbol{w} \end{align} \] 那么准则函数变为 \[ J(\boldsymbol{w})=\frac{\boldsymbol{w}^T\boldsymbol{S}_B\boldsymbol{w}}{\boldsymbol{w}^T\boldsymbol{S}_W\boldsymbol{w}} \] 我们想要找到的是这个准则函数的最大值,那么此时需要找到该函数的导数为零点。
可以最终计算得到 \[ J'(\boldsymbol{w})=0\Rightarrow \boldsymbol{w}=\boldsymbol{S}_W^{-1}(\boldsymbol{m}_1-\boldsymbol{m}_2) \]
示例
现有某商品评分表如下

现在有评分为 \(\boldsymbol{x}^T=(9, 5, 4)\),判断其是否愿意购买此商品。
1 | import numpy as np |
实际上,判决用的判决边界值是该判别函数的标准截距。
支持向量机
支持向量
我们知道将训练样本分开的超平面可能有许多种,但是哪一个超平面是好的判决面呢?
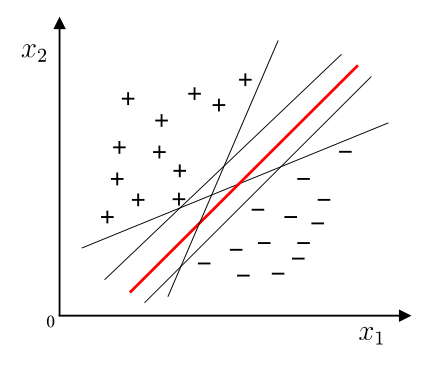
很自然的我们会选择正中间的超平面,因为它的容忍性好,鲁棒性高,泛化能力最强。换句话说,它拥有的裕量大。
于是我们定义最优分类界面是给定线性可分样本集,能够将样本分开的最大间隔超平面。
其中,样本集与分类界面之间的距离 \(r\) 定义为样本与分类界面之间几何间隔的最小值。
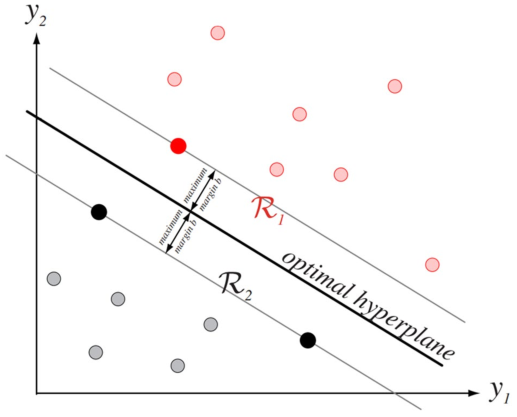
我们把距离最优分类界面最近的这些训练样本称作支持向量,那么可以发现最优分类界面完全由支持矢量决定。
支持向量就像是维持超平面稳定的柱子。
然而支持向量的寻找比较困难。
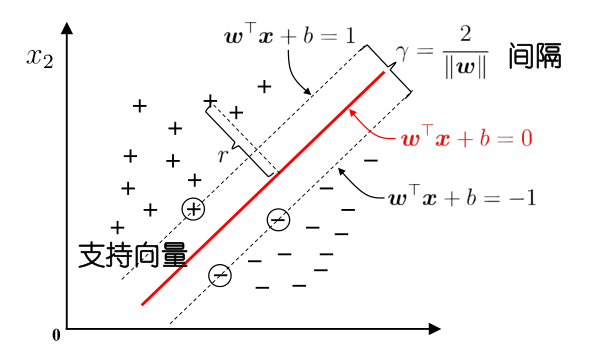
我们将其转化,由判决函数 \[ g(\boldsymbol{x})=\boldsymbol{w}^T\boldsymbol{x}+b \] 知道解向量可以任意伸缩,同时保持超平面不变,即 \(g(\boldsymbol{x})=0\)。
现在缩放 \(\boldsymbol{w}\) 和 \(b\) 使得对 \(\omega_1\) 类的支持向量满足 \(g(\boldsymbol{x})=1\) 而对 \(\omega_2\) 类的支持向量满足 \(g(\boldsymbol{x})=-1\)。
那么可以用方程表示为 \[ \boldsymbol{w}^T\boldsymbol{x}_i+b\geq +1\\ \boldsymbol{w}^T\boldsymbol{x}_i+b\leq -1 \] 即 \[ z_kg(\boldsymbol{x}_k)\geq1 \] 模式属于 \(\omega_1\) 或是 \(\omega_2\) 我们分别令 \(z_k=\pm1\)。
由判决面性质可知,距离 \(r\) 满足 \[ r=\frac{g(\boldsymbol{x})}{\|\boldsymbol{w}\|} \] 定义间隔 \(\gamma=\frac{2}{\|\boldsymbol{w}\|}\),其中可以知道支持向量上满足 \(r=\pm1\)。
那么我们更进一步就是想使得间隔 \(\gamma\) 最大,不妨定义准则函数 \[ J(\boldsymbol{w})=\min_a\frac{1}{2}\|\boldsymbol{w}\|^2 \] 同时要满足 \[ z_kg(\boldsymbol{x})\geq 1 \] 但我们想要找到该准则函数的极小值,由于其带有约束条件,不能使用简单直接的梯度下降法。
不等式约束的极小值
朗格朗日定理
拉格朗日乘数法指出,要找到 \(z=f(x,y)\) 在约束条件 \(\varphi(x,y)=0\) 下的极值点,先构造拉格朗日函数 \[ L(x,y,\lambda)=f(x,y)+\lambda \varphi(x,y) \] 其中 \(\lambda\) 为某一常数。由 \[ \begin{cases} f_x(x,y)+\lambda\varphi_x(x,y)=0\\ f_y(x,y)+\lambda\varphi_y(x,y)=0\\ \varphi(x,y)=0 \end{cases} \] 解出 \(x,y,\lambda\),其中 \(x,y\) 就是可能的极值点坐标。
将拉格朗日定理转化为与我们问题相关的形式,问题定义为 \[ \min f(\boldsymbol{x})\\ \text{s.t. }h_i(\boldsymbol{x})=0,i=1,2,\cdots,l \] 作出拉格朗日函数 \[ L(\boldsymbol{x},\boldsymbol{\lambda})=f(\boldsymbol{x})-\sum^{l}_{i=1}\lambda_ih_i(\boldsymbol{x}) \] 其中,\(\boldsymbol{\lambda}=(\lambda_1,\lambda_2,\cdots,\lambda_l)^T\) 称作乘子向量。
若 \(\boldsymbol{x}^*\) 是局部极小值,那么一定存在 \(\boldsymbol{\lambda}^*\) 满足 \[ \nabla_xL(\boldsymbol{x}^*,\boldsymbol{\lambda}^*)=0 \] 即 \[ \nabla_xf(\boldsymbol{x}^*)-\sum^{l}_{i=1}\lambda^*_i\nabla h_i(\boldsymbol{x}^*)=0 \]
KT 最优性条件
约束优化的一阶必要条件是由 Kuhn 和 Tuchker 于 1951 年提出,所以一阶必要条件又称为 KT 条件,满足 KT 条件的点又称作 KT 点。
KT 最优性条件是用于求解不等式约束的,问题定义如下 \[ \min f(\boldsymbol{x})\\ \text{s.t. }h_i(\boldsymbol{x})\geq0,i=1,2,\cdots,l \] 在拉格朗日定理的基础上,增加约束条件,即为 \[ \begin{cases} \nabla_xf(\boldsymbol{x}^*)-\sum^{l}_{i=1}\lambda^*_i\nabla h_i(\boldsymbol{x}^*)=0\\ h_i(\boldsymbol{x}^*)\geq0,\lambda_i^*\geq0,\lambda^*_ih_i(\boldsymbol{x}^*)=0,i=1,2,\cdots,l \end{cases} \] 这样就可以解决带不等式约束的极小值。
对偶问题
对偶问题是最优化问题的一个重要概念,它与原始问题相对应,通过对偶问题的解,可以推导出原始问题的解或相关信息。
对偶问题的主要思想是:将原问题中的部分约束条件转移到目标函数中,变为目标函数中的惩罚项。从而得到一个新的最优化问题,这就是对偶问题。
比如说一个原始问题是 \[ \min f(x)\\ \text{s.t. }c(x)=0,h(x)<=0 \] 其中 \(f(x)\) 是目标函数,\(c(x)=0\) 是等式约束,\(h(x)\leq 0\) 是不等式约束。
那么对应的对偶问题是 \[ \max g(u,v)=uc(x)+vh(x)\\ \text{s.t. }u\geq0,v\geq0 \]
支持向量机
依据上面的原理,我们可以得到支持向量机的模型可以转化为 \[ \begin{cases} \nabla\frac{1}{2}\|\boldsymbol{w}\|^2-\sum^{l}_{i=1}\lambda_i\nabla(z_kg(x_i)-1) =0\\ z_kg(x_i)-1\geq 0,\lambda_i\geq 0,\lambda_i g(x_i)=0 \end{cases} \] 一个两类分类问题有以下点 \[ \omega_1:(1,1),(1,-1)\\ \omega_2:(-1,1),(-1,-1) \] 通过以上知识,可以写出代码
1 | import sympy |
以下是等价问题的转换。
由基本的支持向量机公式,我们有拉格朗日函数 \[ L(\boldsymbol{w},\lambda_i)=\frac{1}{2}\|\boldsymbol{w}\|^2-\sum^{l}_{i=1}\lambda_i\nabla(z_kg(\boldsymbol{x}_i)-1) \] 令拉格朗日函数偏导为零,代入公式可得 \[ \max_\boldsymbol{\lambda} L(\boldsymbol{\lambda})=\sum_{i=1}^l\lambda_i-\frac{1}{2}\sum^l_{k,j=1}\lambda_k\lambda_jz_kz_j\boldsymbol{x}_k^T\boldsymbol{x}_j\\ \text{s.t. }\sum_{i=1}^l\lambda_iz_i=0,\lambda_i\geq 0 \] 即等价于二次规划问题。
比如说我们有二分类问题,样本为 \[ \omega_1:\boldsymbol{x}_1=(3,3),\boldsymbol{x}_2=(4,3)\\ \omega_2:\boldsymbol{x}_3=(1,1) \] 解 \[ \min_\boldsymbol{\lambda}\frac{1}{2}\sum^l_{k,j=1}\lambda_k\lambda_jz_kz_j\boldsymbol{x}_k^T\boldsymbol{x}_j-\sum_{i=1}^l\lambda_i\\ =\frac{1}{2}(18\lambda_1^2+25\lambda_2^2+2\lambda_3^2+42\lambda_1\lambda_2-12\lambda_1\lambda_3-14\lambda_2\lambda_3)-\lambda_1-\lambda_2-\lambda_3\\ \text{s.t. }\lambda_1+\lambda_2-\lambda_3=0,\lambda_i\geq0,i=1,2,3 \] 将约束条件 \(\lambda_3=\lambda_1+\lambda_2\) 带回目标函数得到 \[ s(\lambda_1,\lambda_2)=4\lambda_1^2+\frac{13}{2}\lambda_2^2+10\lambda_1\lambda_2-2\lambda_1-2\lambda_2 \] 求 \(\nabla s=0\),得到 \(s(\lambda_1,\lambda_2)\) 在 \((\frac{3}{2},-1)\) 上取极值,但不满足 \(\lambda_i\geq 0\) 的约束条件,故在边界上找最小值。
当 \(\lambda_1=0\) 时,最小值 \(s(0,\frac{2}{13})=-\frac{2}{13}\);
当 \(\lambda_2=0\) 时,最小值 \(s(\frac{1}{4},0)=-\frac{1}{4}\)。
故取最小值 \(\lambda_1=\frac{1}{4},\lambda_2=0,\lambda_3=\frac{1}{4}\),这样,\(\boldsymbol{x}_1,\boldsymbol{x}_3\) 为支持向量。
利用 KT 条件反求得到 \(w_1=w_2=\frac{1}{2},b=-2\),故分离超平面为 \[ \frac{1}{2}x_1+\frac{1}{2}x_2-2=0 \]
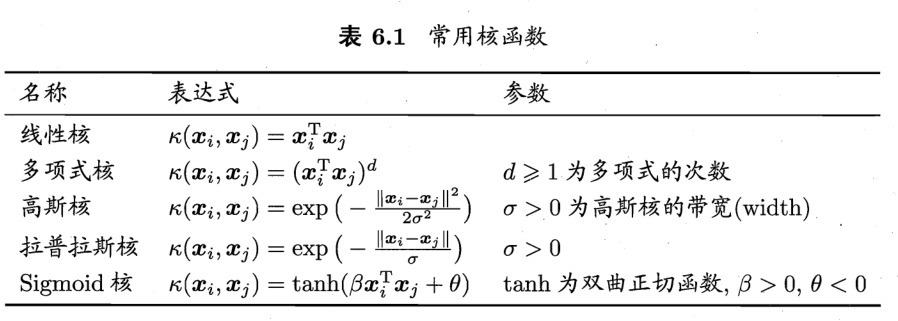
核函数
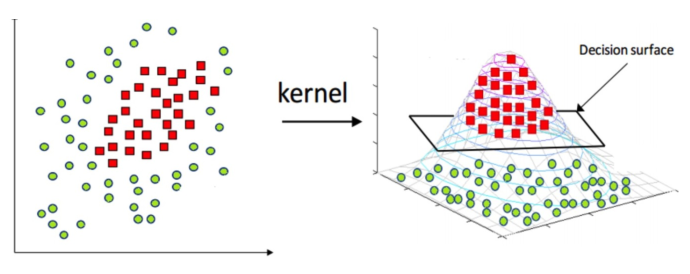
对于线性不可分问题,我们需要将样本从原始空间映射到一个更高维的特征空间,使得样本在这个特征空间内线性可分,而映射的特征是基于原本特征的数学意义上的拓展特征。
那么我们就可以将原本的特征向量作映射,将支持向量机的模型拓展为 \[ \max_\boldsymbol{\lambda} L(\boldsymbol{\lambda})=\sum_{i=1}^l\lambda_i-\frac{1}{2}\sum^l_{k,j=1}\lambda_k\lambda_jz_kz_j\phi(\boldsymbol{x}_k)^T\phi(\boldsymbol{x}_j)\\ \text{s.t. }\sum_{i=1}^l\lambda_iz_i=0,\lambda_i\geq 0 \] 其中,\(\phi(\boldsymbol{x})\) 是映射函数,也称核映射,即将 \(l\) 维的特征空间映射到更高维的特征空间。
那么分离超平面则为 \[
f(\boldsymbol{x})=\boldsymbol{w}\phi(\boldsymbol{x})+b
\] 
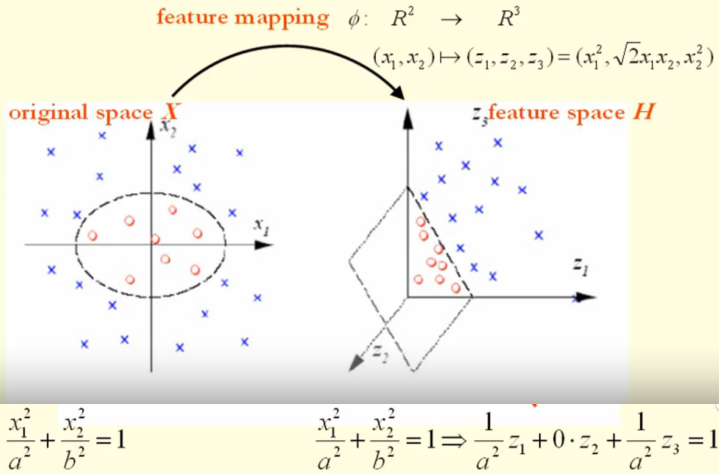
比如说一个可能的核映射函数是从 \(R^2\to
R^3\),即 \[
(x_1,x_2)\to(z_1,z_2,z_3)=(x_1^2,\sqrt{2}x_1x_2,x_2^2)
\] 
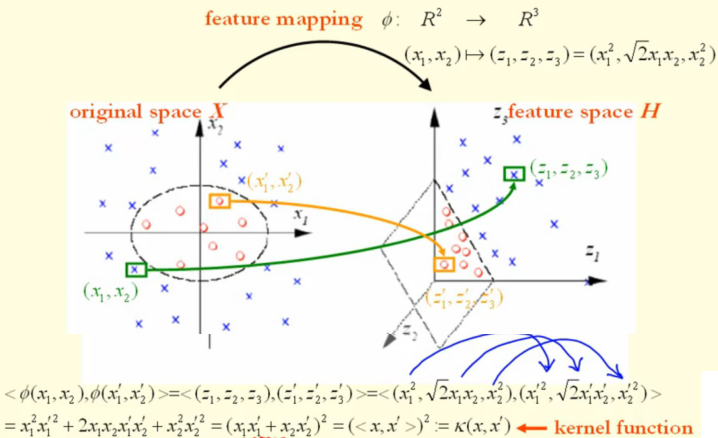
但我们知道,如果计算核映射,且计算高纬度的核映射,我们不仅需要设计一个好的核映射,还必须快速的去计算它,这是复杂的。
那么,我们可以发现,在约束中实际上核映射后的结果仅以内积的形式呈现,不妨我们设计一个核函数 \[ k(\boldsymbol{x}_i,\boldsymbol{x}_j)=\phi(\boldsymbol{x}_i)^T\phi(\boldsymbol{x}_j) \] 这样我们就可以不显式地设计核映射,而是设计核函数。(基本想法)
比如对于上面例子中的核映射,我们可以计算得到其核函数为 \[
k(\boldsymbol{x}_i,\boldsymbol{x}_j)=(\boldsymbol{x}_i^2+\boldsymbol{x}_j^2)^2
\] 
核支持向量机
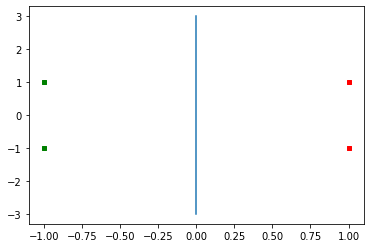
基于核函数的思想,我们可以得到一个新的支持向量机模型,即核支持向量机模型 \[ \max_\boldsymbol{\lambda} L(\boldsymbol{\lambda})=\sum_{i=1}^l\lambda_i-\frac{1}{2}\sum^l_{k,j=1}\lambda_k\lambda_jz_kz_jk(\boldsymbol{x}_k,\boldsymbol{x}_j)\\ \text{s.t. }\sum_{i=1}^l\lambda_iz_i=0,\lambda_i\geq 0 \] 例如对于在二位特征平面上线性不可分问题 XOR 问题,我们可以设计一个核函数为 \[ k(\boldsymbol{x}_i,\boldsymbol{x}_j)=[1+\boldsymbol{x}_i^T\boldsymbol{x}_j]^2 \] 使其在该空间上是线性可分的,一个可以构成这个核函数的核映射为 \[ \phi(\boldsymbol{x})=(1,\sqrt{2}x_1,\sqrt{2}x_2,\sqrt{2}x_1x_2,x_1^2,x_2^2) \] XOR 问题中, \[ \omega_1:\boldsymbol{x}_1=(1,1),\boldsymbol{x}_3=(-1,-1)\\ \omega_2:\boldsymbol{x}_2=(1,-1),\boldsymbol{x}_4=(-1,1) \] 计算过程忽略,我们可以得到 \[ L(\boldsymbol{\lambda})=\lambda_1+\lambda_2+\lambda_3+\lambda_4\\-\frac{1}{2}(9\lambda_1^2-2\lambda_1\lambda_2-2\lambda_1\lambda_3+2\lambda_1\lambda_4\\+9\lambda_2^2+2\lambda_2\lambda_3-2\lambda_2\lambda_4\\+9\lambda_3^2-2\lambda_3\lambda_4\\+9\lambda_4^2) \] 最终得到 \(\lambda_1=\lambda_2=\lambda_3=\lambda_4=\frac{1}{8}\),四个样本均为支持向量。
最终解得最优分离超平面为 \[ f(\boldsymbol{x})=-x_1x_2=0 \]